论文: HyperNet: Towards Accurate Region Proposal Generation and Joint Object Detection
1 简介
这篇文章主要解决了两个问题:
- 解决 R-CNN 系列 目标检测模型,需要生成几百上千的候选框(Faster R-CNN 300;Fast R-CNN 2000)的问题。HperNet 只需生成 100~200个候选框。而精度比 Faster R-CNN 还要好一点。
- 将deep ConvNet的高低层特征进行融合,进而利用融合后的特征进行region proposal提取和进一步目标检测。提升了对小目标的检测效果。
主要的贡献:
object proposal task 上:使用50个proposals 可以获得95%的recall;使用100个proposals可以获得97%的recall。
注意:这个recall只是用于region proposals的,并不是针对 PASCAL 或 COCO 数据集的最终检测效果的recall。就是说事先生成的 几百个region 与 ground truth 的区域IOU在某一阈值之上的region 占总 的ground truth的比例,这个比例自然是比最终detection的recall要高很多的。因为这个阶段相当于一个弱检测器,约束条件也不高,生成的框里面自然会包含很多 ground truth 的区域。
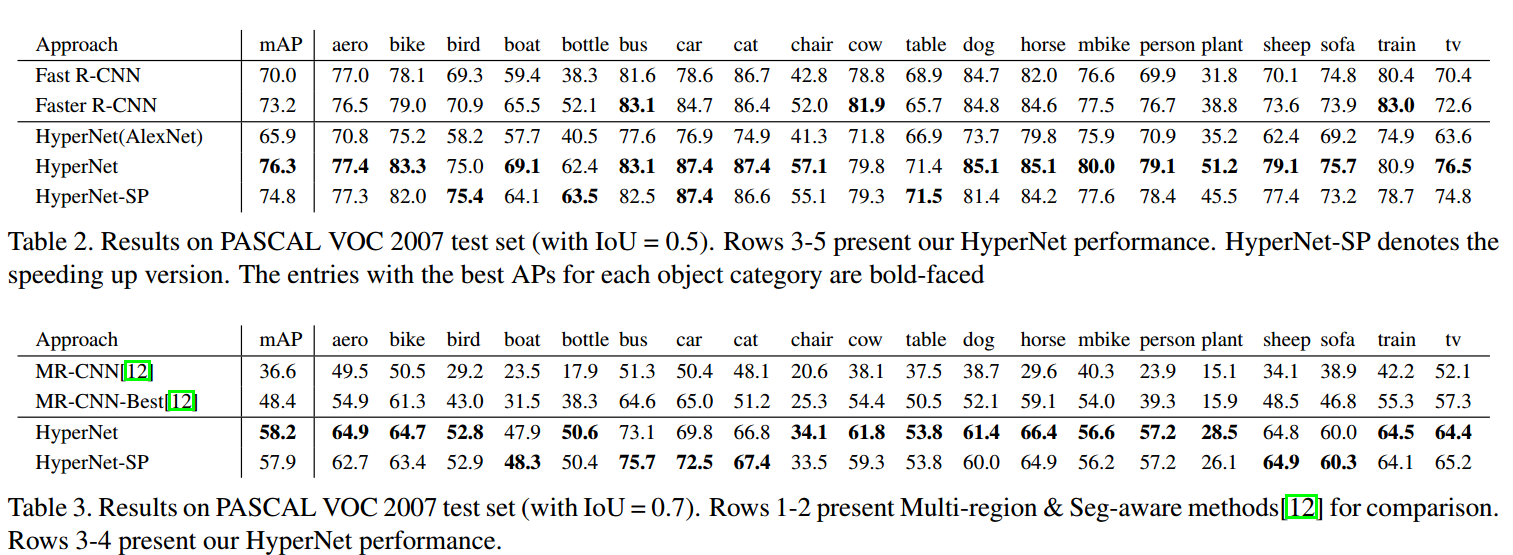
detection challenges 上:在PASCAL VOC 2007 和 2012 数据集上取得的 平均检测精度(mAP),分别为76.3%和71.4%。比Fast R-CNN分别高了6个和3个百分点。
HperNet 的快速版,可以达到 5FPS的速度。
宏观架构:
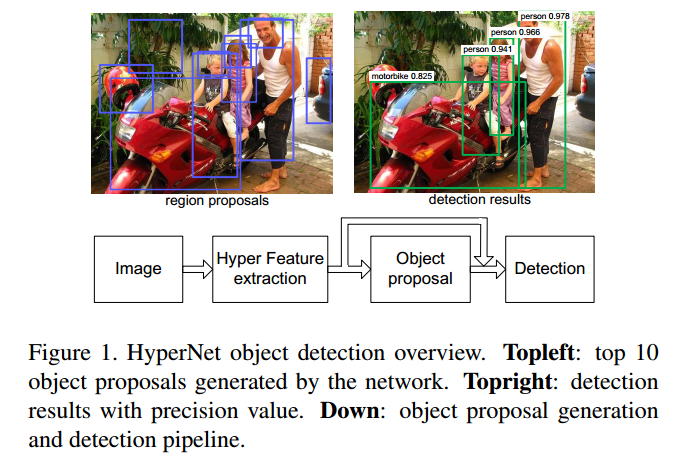
整个网络结构也属于两步检测,即先生成 region proposals ,再进行检测。
2 HyperNet 网络结构
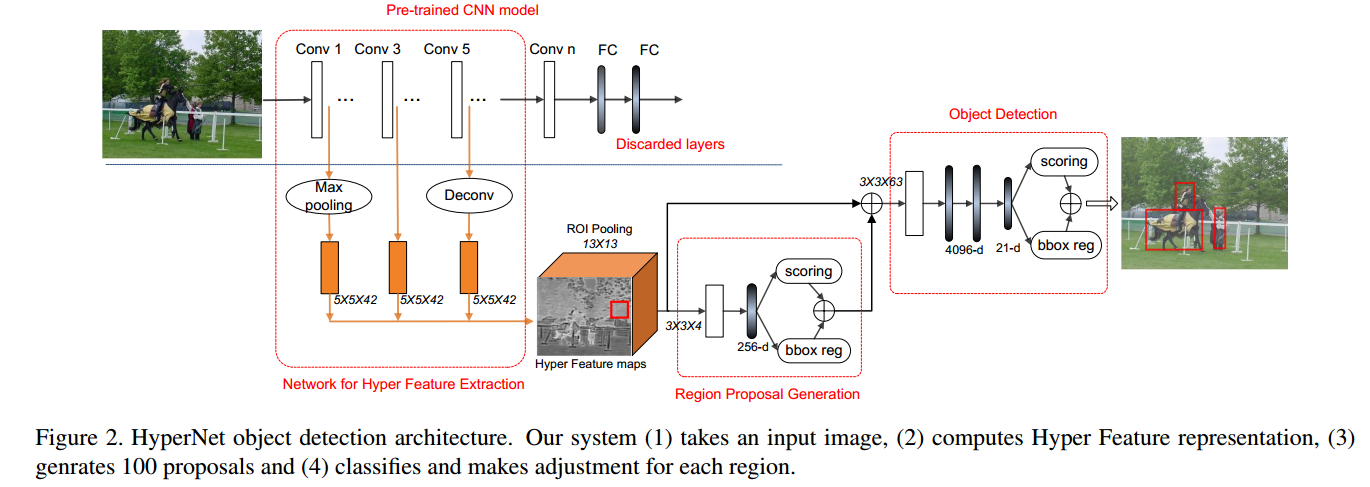
图中标注的 写法 比如 5×5×42 指的是,这是一个5×5的卷积核,卷积核的个数为42个,其他的 3×3×4,3×3×63也是一样的写法,写的都是卷积核的参数。
整个网络结构跟 Faster R-CNN 还是比较像的。
主要分为三部分:
- 第一部分:卷积层提取特征,然后进行特征融合;
- 第二部分:弱检测器,生成候选区域,卷积层+全连接层, Conv+FC;
- 第三部分:强检测器,生成最终的检测结构,卷积层 + 全连接层,Conv+FC。
下面分别介绍:
2.1 Hyper Feature Production
特征融合,如下图:
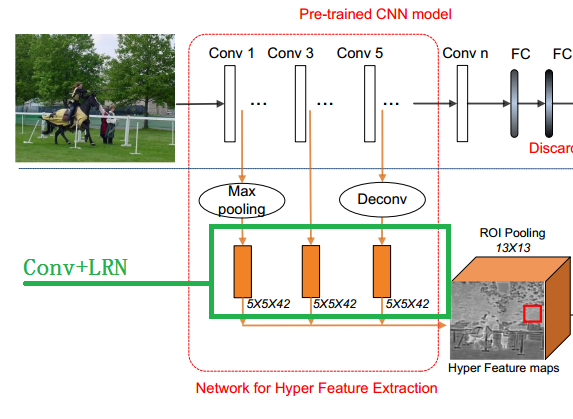
- 将图片resize,使得最短边 为600(比如:resize后的大小为 1000×600);
- 首先使用基础卷积神经网络(Alexnet,VGG)提取特征;
- 在最底层卷积层(conv1)后面加上 max pooling 层,实现降采样;
- 在最高层卷积层(conv5)后面加上 反卷积 deconv 层,实现上采样;
- 中间层(conv3)不做处理;
- 在上一步操作之后每一个 level 后面都再加 一系列卷积层(绿框中的黄色矩形): 进一步提取语义特征、将不同分辨率的feature map 压缩到相同的分辨率。
- 卷积后每个 feature map 加局部响应归一化 LRN,之后输出 Hyper Feture maps。这里的Hyper Feture maps的大小不是13×13×126的,图上写的那个 13×13 是经过ROI 的大小(红色框框)。这点作者没说清楚,代码也没有,搞不明白Hyper Feture maps到底是多大。
假设使用VGG做特征提取,输入图片为1000×600。那么Conv1、Conv2、Conv3、Conv4、Conv5层的feature map 输出(不含池化层)分别为 1000×600,500×300,250×150,125×75,62.5×37.5。
最后的feature map会是62×37, 这样会造成信息损失。
- 因此把最后的Conv5层的feature map通过反卷积上采样到250×150,然后再经过一系列卷积;
- 把第一层Conv1的feature map做一个max pooling 降采样,然后再经过一系列卷积;
- 中间层,不做变化,直接经过一系列卷积;
- 然后把1,3,5层的feature map 进行 LRN之后连在一起。LRN是必要的,因为不同层的feature resolution 不同,如果不做正则,norm大的feature会压制住norm小的feature。
2.2 Region Proposal Generation
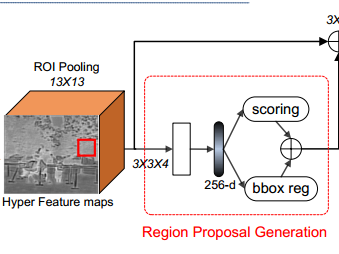
如上图,对于Hyper Feture maps 使用 ROI pooling 。ROI pooling 的大小是 13×13的,因此最后输出的特征是 ROI feature 是 13×13×126的。中间那个红色的框框是ROI,但是怎么来的,作者没说清楚。
ROI pooling之后使用了 3×3的4个卷积核。输出的是 13×13×4 的feature map,图上那个空白的矩形就是。之后再经过一个256维的 全连接层;再之后并行经过两个 两个全连接层,分别是分类和回归(用于定位)。
这个阶段每张图片生成 30k 个不同尺寸的 候选框。然后通过NMS,减少到1k 个,然后再取 top-100或top-200个。
不过有个疑问的地方:这里的ROI是怎么来的作者没说清楚。
这也是与Faster R-CNN的不同之处,Faster R-CNN的 ROI Pooling 是在RPN生成 region proposals 之后作用在生成的region上的。如下图Faster R-CNN的结构,对比一下二者在整体结构上的差别。
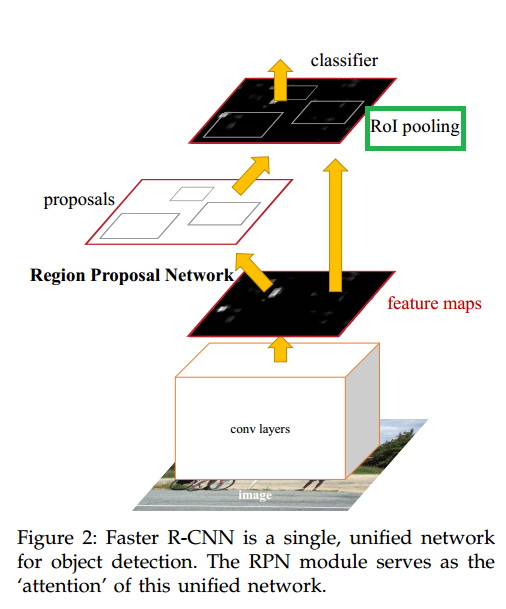
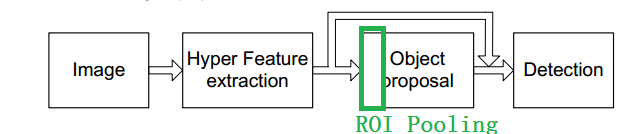
而在HyperNet中在生成region proposals时就使用了 ROI Pooling ,如下。
Faster R-CNN中的ROI是 RPN生成的 region proposals。
HyperNet中的ROI是怎么来的是个疑问。而且HyperNet中的ROI相当于 Faster R-CNN中的anchor box。
一直不知道HyperNet中的ROI是怎么来的,直到我在知乎上找到了 这个帖子: 对话CVPR2016:目标检测新进展
这个帖子的作者(孔涛,清华大学)好像就是这篇文章的作者 (Tao Kong,Tsinghua University)
里面有一段话:
HyperNet:文章的出发点为一个很重要的观察:神经网络的高层信息体现了更强的语义信息,对于识别问题较为有效;而低层的特征由于分辨率较高,对于目标定位有天然的优势,而检测问题恰恰是识别+定位,因此作者的贡献点在于如何将deep ConvNet的高低层特征进行融合,进而利用融合后的特征进行region proposal提取和进一步目标检测。不同于Faster R-CNN,文章的潜在Anchor是用类似于BING[4]的方法通过扫描窗口的方式生成的,但利用的是CNN的特征,因此取得了更好的性能。
通过以上的改进策略,HyperNet可以在产生大约100个region proposal的时候保证较高的recall,同时目标检测的mAP相对于Fast R-CNN也提高了大约6个百分点。
里面有一句:
不同于Faster R-CNN,文章的潜在Anchor是用类似于BING[4]的方法通过扫描窗口的方式生成的,但利用的是CNN的特征,因此取得了更好的性能。
也就是说 HyperNet中的ROI 是使用类似于BING的方法提取的 ,上面提到的 BING[4] 文献是:
[4] Cheng M M, Zhang Z, Lin W Y, et al. BING: Binarized normed gradients for objectness estimation at 300fps. In CVPR 2014
这篇文章的项目主页是:http://mmcheng.net/bing/
大概看了一下论文,是一种利用手工设计的特征进行 object 估计的。这个特征叫做 binarized normed gradients features (BING). 具体是怎么弄的,没仔细看。
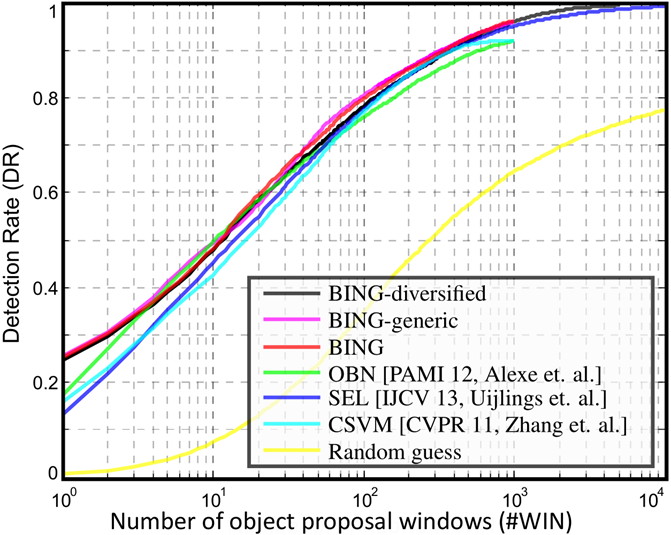
看一下结果好了,图中的SEL是我们熟知的 Selective Search算法。DR是指object detection rate ,不清楚怎么算的。
运行速度如下:
测试条件:Intel i7-3940XM CPU
| Method | [1] | OBN [2] | CSVM [3] | SEL [4] | Our BING |
|---|---|---|---|---|---|
| Time (seconds) | 89.2 | 3.14 | 1.32 | 11.2 | 0.003 |

可见BING是比 Selective Search效果更好的算法,速度也比 Selective Search 快很多,可达300FPS。
也就是说HyperNet使用了额外的 region 估计算法,使得后面的 region proposals 提取的region更加精确,然后之后再进行object detection。
作者说的是使用的是类似于 BING的方法,具体怎么用的,没有代码,不知道是怎么用的。
2.3 Object Detection
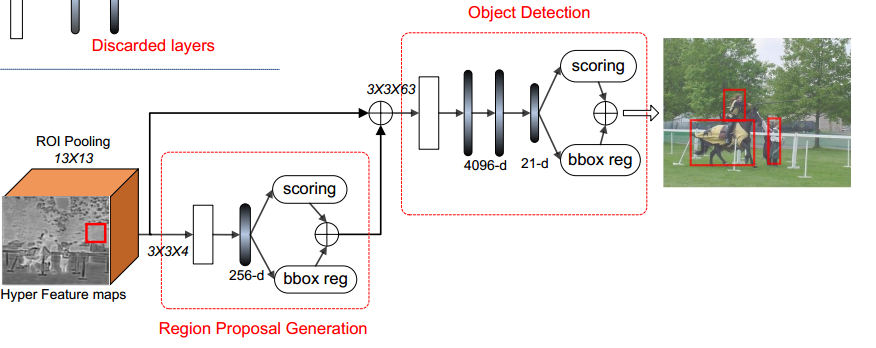
与Faster R-CNN不同之处在于 在两个全连接层之前使用了一个 3×3 卷积层,降低了输入通道(从126到63)。后面是三个全连接层。
还有一个不同是,全连接层之间的 dropout 层的概率使用的是0.25,不是0.5。
2.4 训练策略
损失函数:

没啥大变化
训练步骤:
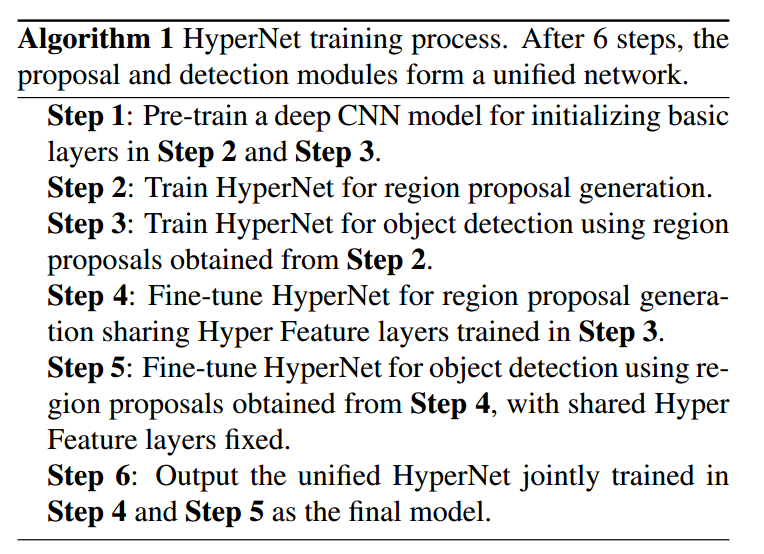
与Faster R-CNN训练步骤一样,都是先训练 region proposals 网络,然后保持卷积层部分权值不动,再训练object detection 网络。然后再保持卷积层特征提取部分权值不动,再训练region proposals 网络。
只不过这里多训练了两次。
2.5 加速
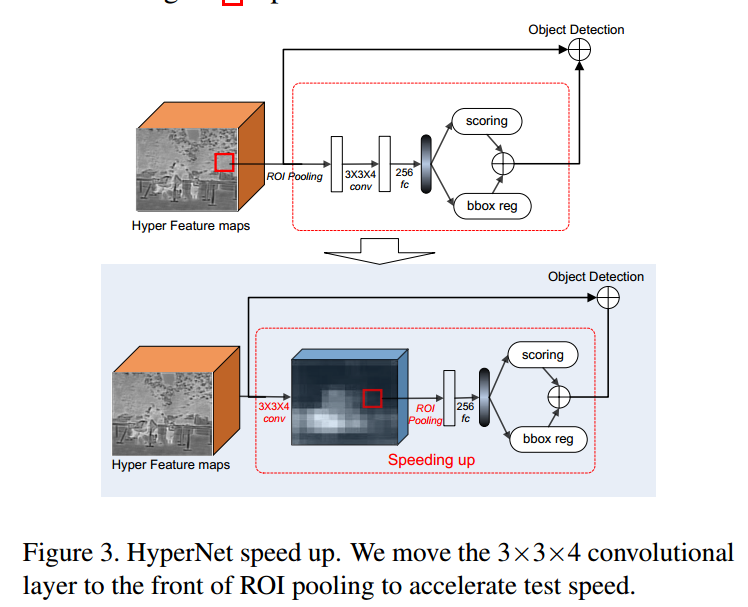
如上图,上边的图中两个空白矩形框,第一个是 ROI Pooling的输出,第二个是 3×3卷积的输出。
下边 的图中,3×3卷积的输出用了一个立方体,后面那个白色矩形框是ROI Pooling的输出。
在生成region proposals 时,将卷积层放在 ROI Pooling层之后,可以实现加速。
- 先卷积降低了通道数量(由126降到4);
- 大量 proposal 的conv操作移至前方,实现计算共享;
- ROI Pooling 后面分类器的结构变成了全连接层,简化结构,之前是 卷积层+全连接层。(个人觉得这个作用不大)
使用这个策略获得了 40倍的加速。
3 试验结果分析
3.1 region proposals
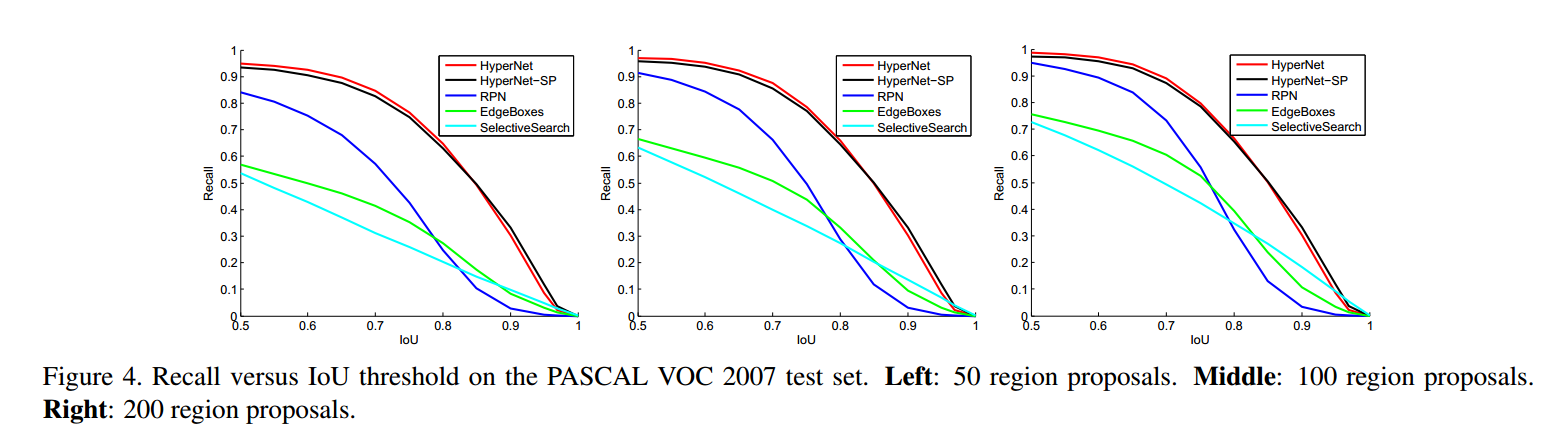
上图衡量的是 不同的IOU 阈值 对 recall的影响。再说明一下,这个recall不是最终的detection recall。而是region proposals recall。 IOU 阈值越大,条件越严苛,recall势必会下降。对比几条不同方法的结果,HyperNet下降的最慢,比其他方法recall也高。
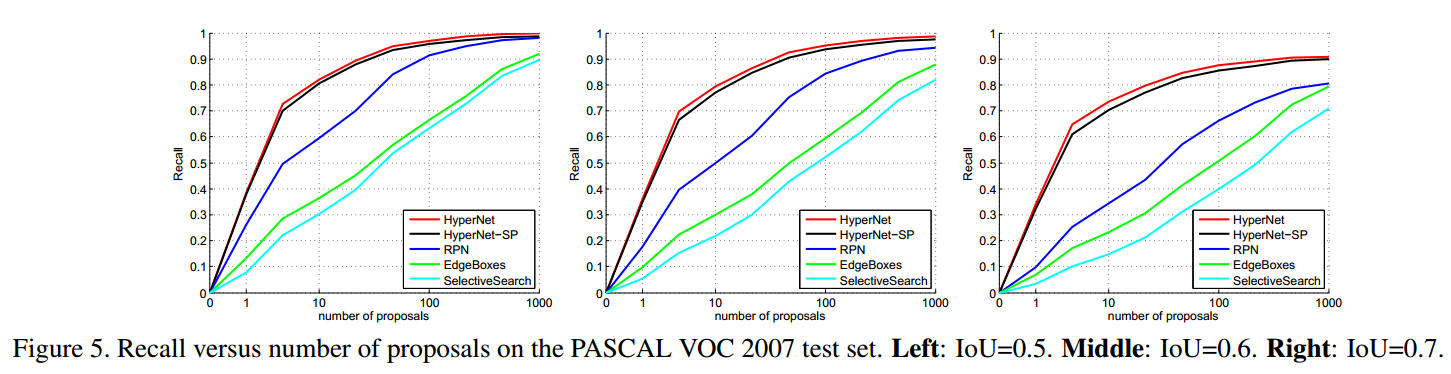
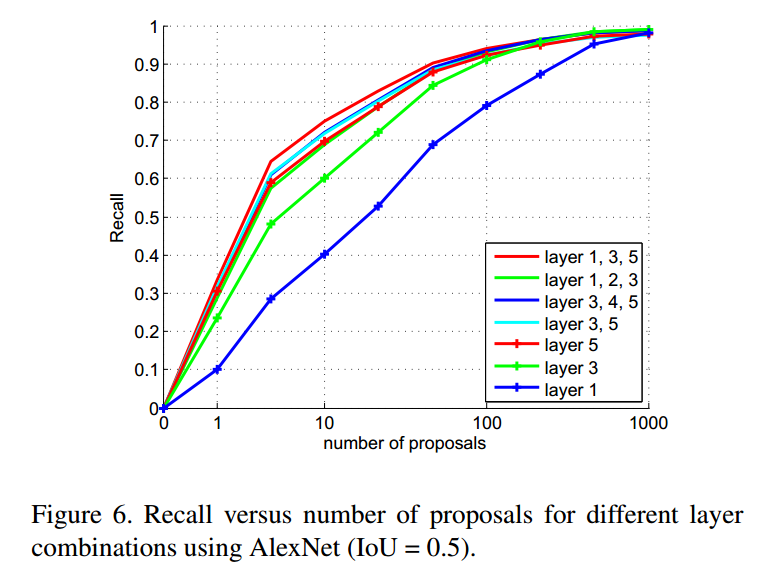
上图衡量的是 不同的proposals 数量 对 recall的影响。再说明一下,这个recall不是最终的detection recall。而是region proposals recall。 proposals数量越少,条件越严苛,recall势必会下降。对比几条曲线,HyperNet下降的最慢,比其他方法recall也高。
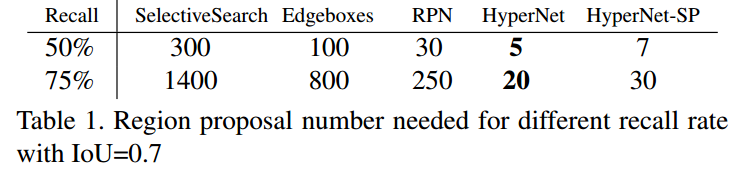
上面这个表,衡量的是IOU=0.7的情况下,region proposals recall达到50%和75%时,需要proposals的数量。很明显 HyperNet需要的最少。
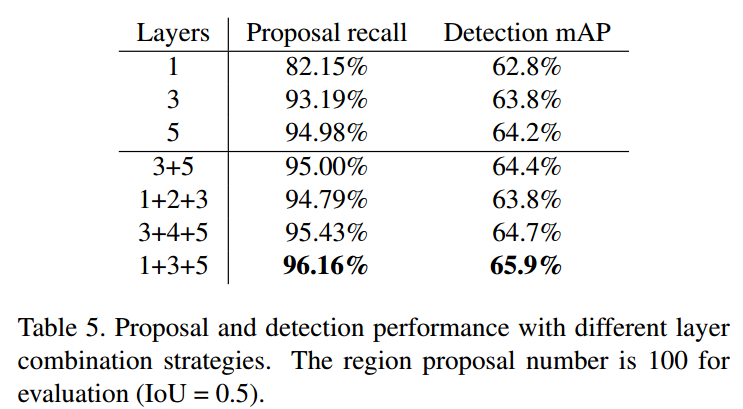
Conv1、Conv2、Conv3、Conv4、Conv5 5个卷积层,为什么选择1,3,5呢?答案在下图中。
3.2 Object Detection
结果:
VOC 2007
VOC 2012

关于小目标的检测,没有明确标准,只是使用的PASCAL VOC中相对较小的目标(bottle,plant,chair等)做检测。
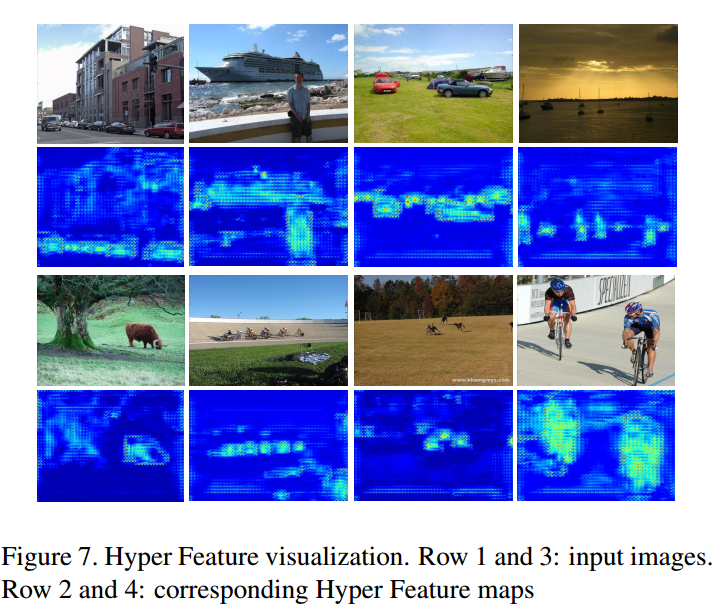
3.3 Hyper Feature Visualization
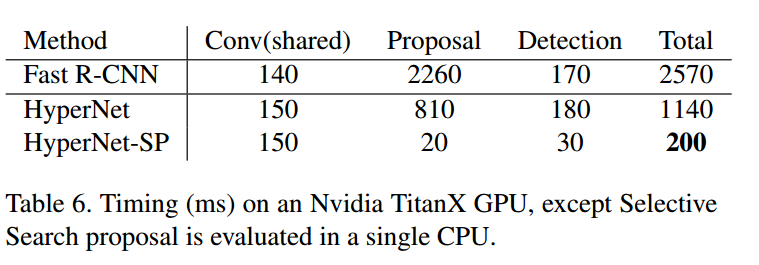
3.4 Running Time
4 总结
整个网络就是 Faster R-CNN的改进版。最大的改进就是特征融合方法(Hyper Feature)和ROI 的提取方法(BING)。使得region proposals的数量最少降到了100,就可以获得比 Faster F-CNN高的mAP。
另外,虽然作者说对小目标的的预测效果有改善,但只是从定性的方面来表达的,个人认为应该针对 COCO数据集进行定量测试才更有说服力。
5 参考资料
- 孔涛:对话CVPR2016:目标检测新进展:https://zhuanlan.zhihu.com/p/21533724
- BING: http://mmcheng.net/bing/
- http://blog.csdn.net/u012361214/article/details/51374012