论文:Focal Loss for Dense Object Detection ICCV2017 Best Student Paper Award
代码:https://github.com/facebookresearch/Detectron
1 问题提出
two-stage detector :精度高,速度慢
the first stage : 生成一个 稀疏的候选框的集合 (a sparse set of candidate proposals ),过滤掉大部分负样本( filtering out the majority of negative locations)
这第一阶段可以采用:selective search,edgebox,RPN等算法完成,是一个弱检测器。
可以极大的降低候选框的数量(e.g., 1-2k)
the second stage:对候选框进行 前景目标 或 背景 的分类 (classifies the proposals into foreground classes / background)
对类别不平衡问题的解决 :
- sampling heuristics:such as a fixed foreground-to-background ratio (1:3), 通过RMS将前景目标和背景(或者负样本和正样本)的比例保持在 1:3 .
- online hard example mining (OHEM) : 一种训练方法
one-stage detector :精度低,速度快
生成一个 稠密的候选框的集合 (a dense set of candidate proposals),直接进行回归。
这个密集的候选框的集合 数量在 100k 左右。然而正样本只有一少部分,大部分都是背景,这个类别不平衡问题比两步检测的方式要严重的多。
解决方法:可以使用上面提到的两种方法,但是由于 易分类样本数量太多 损失函数会被这些样本产生的损失湮没。
这个问题可以使用 bootstrapping 的方法来解决。不过这篇文章提出了一种更有效的方式。
类别不平衡是导致 one-stage 检测方法精度不如 two-stage 的主要原因。
这是比较容易理解的:比如假设一张图片只包含一个目标,一开始有 100k 个可能包含目标的区域,可以先使用一个弱检测器挑选出 1k 个候选区域,然后再用一个强分类器对这 1k 个候选区域进行筛选,挑出最接近ground truth 的区域。这比直接从100k个初始候选区域中直接挑选1个要更精确。而且类别不平衡问题也没有 one-stage 方法的严重。
但是 two-stage 的代价就是:因为是两次分类所以速度上肯定会慢很多。
这篇文章主要是针对类别不平衡问题,解决 one-stage 检测方法精度不高的现象。
2 解决方法 Focal Loss
避免损失函数被 易分类的负样本 产生的损失湮没,注意 是 易分类的负样本
可以从以下两个方面解决
- 修改 正样本 和 负样本 对损失函数的贡献量,使二者平等
- 修改 难分类样本 和 易分类样本 对损失函数的贡献量,使二者平等
以下是 Focal Loss 的设计过程
2.1 交叉熵损失 Cross Entropy (CE)
先看下经典的 交叉熵损失(cross entropy ):

- $y\in\{±1\}$ ,代表正负样本
- $p\in[0,1]$ ,是分类的概率,代表正样本的概率(y=1),那么 $1-p$ 代表负样本的概率(y=-1)
用下式改写

交叉熵损失改写为:

2.2 正负类别平衡的交叉熵损失 Balanced Cross Entropy
修改 正样本 和 负样本 对损失函数的贡献量
- 给正样本的损失 乘上 一个权重 $\alpha \in [0,1]$ ,
- 给负样本的损失乘上 $1-\alpha$ 。
这样可以使二者对损失函数的贡献平等。使用同样的方法用 $\alpha _t$ 代表 $\alpha$ .
将交叉熵损失改写为:

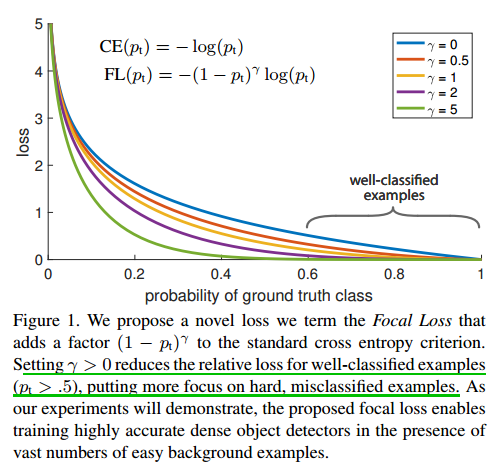
2.3 难易类别平衡的损失 Focal Loss
修改 难分类样本 和 易分类样本 对损失函数的贡献量
引进一个 调节因子 $(1-p_t)^{\gamma}, \gamma \ge 0$ ,
改写损失函数:

- 当 样本错分类(难分类样本),并且 $p_t$ 很小时,调节因子 趋向于1,而 $FL(p_t)$ 与 $CE(p_t)$ 接近;
- 如果是 易分类样本, $p_t$ 很大,调节因子趋向于0,损失也为0。
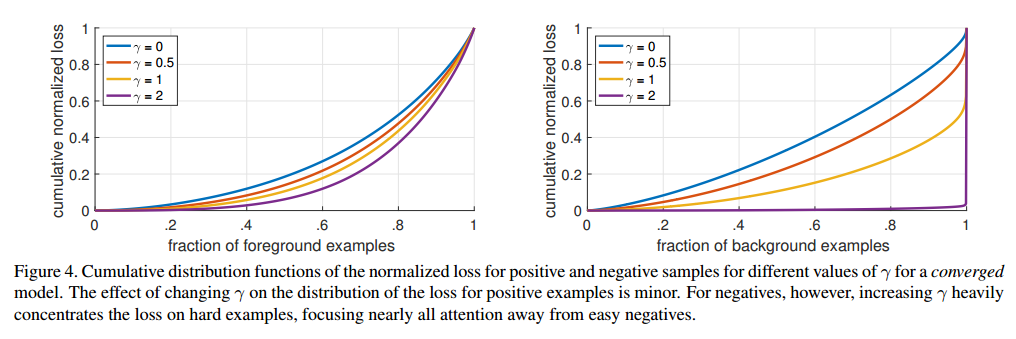
看下图:
最终文章使用的损失函数是这样的:

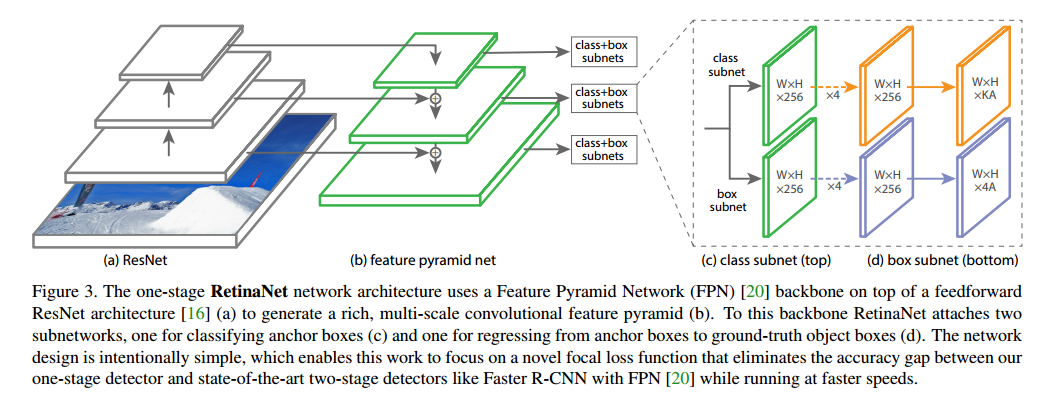
3 RetinaNet Detector
文章构建的一个 one-stage 检测模型,使用了上述提出的损失函数
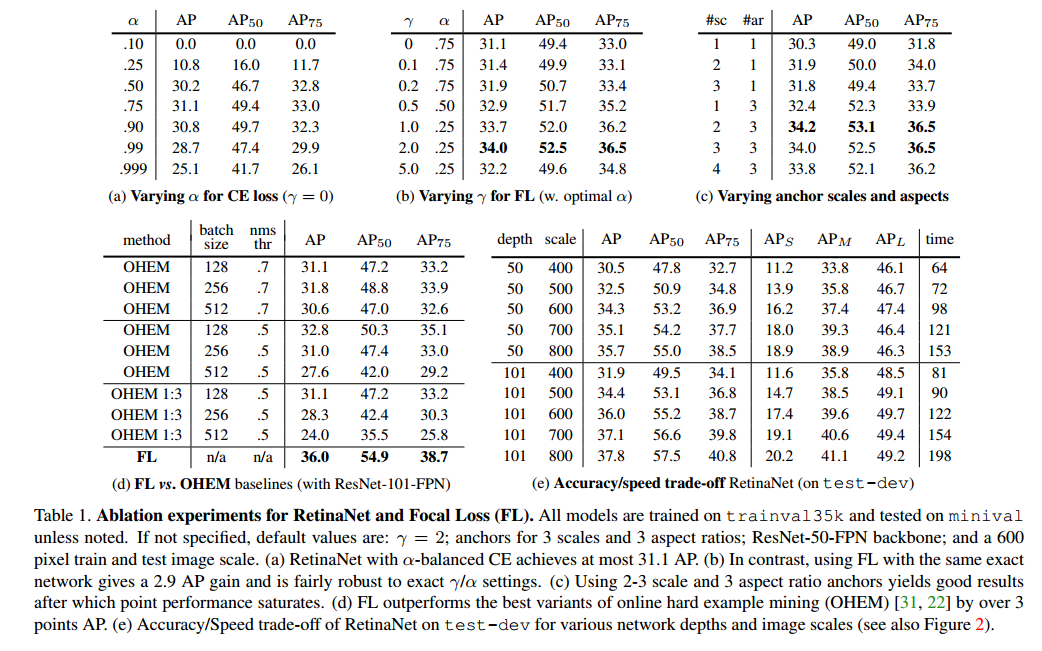
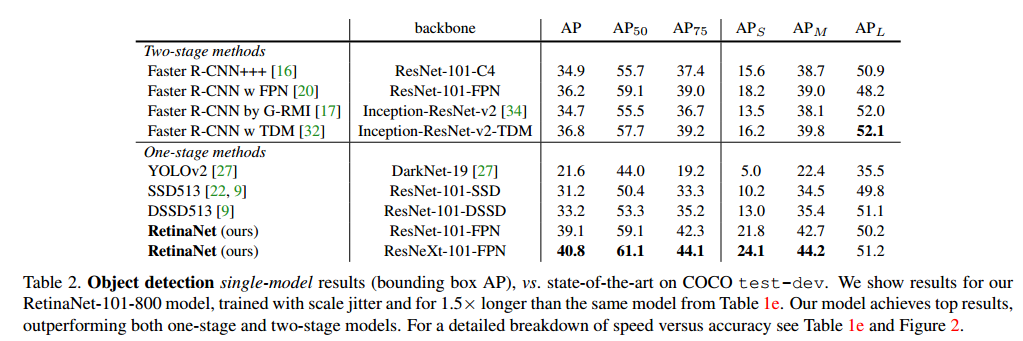
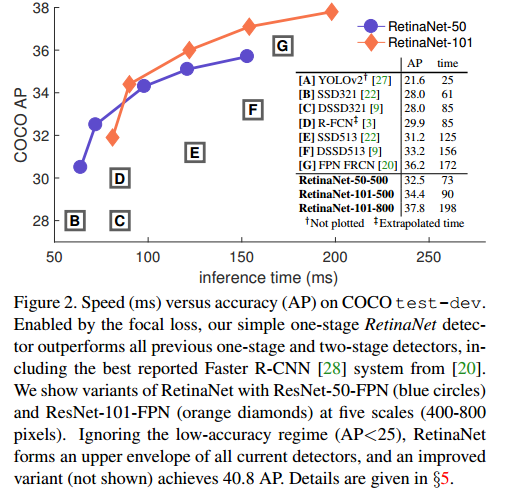
3.1 实验结果