论文:FSSD: Feature Fusion Single Shot Multibox Detector
代码:https://github.com/lzx1413/CAFFE_SSD/tree/fssd
这篇文章在FPN的基础上进行了一定的思考,提出了一种新的特征融合方式,并将这种特征融合方式与SSD相结合,在损失一定速度的情况下,提高了检测精度。
这篇文章立足于特征融合。
1 简要介绍
首先是模型的拓扑结构:
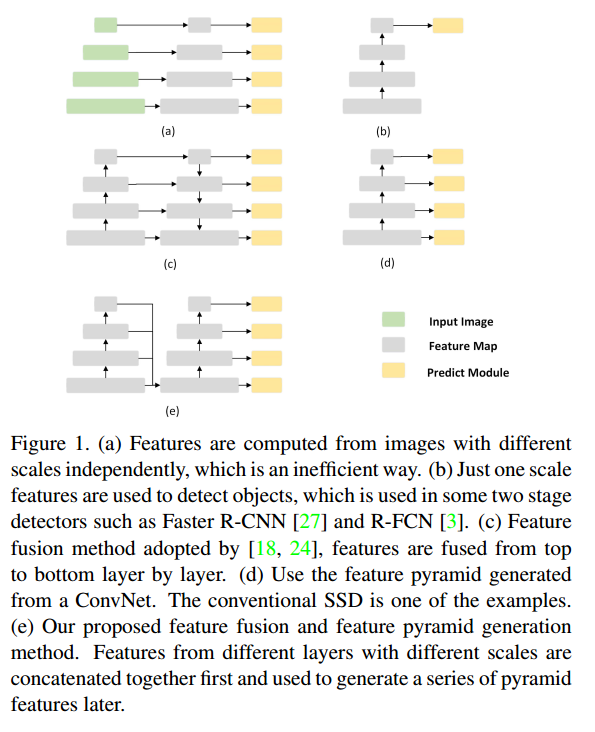
- (a):featurized image pyramids ,使用 image pyramid 构建 feature pyramid,金字塔形状的feature是从不同scale的图片上计算出的。典型的使用这种结构的模型:OverFeat,R-CNN。
- (b):对图片来说只有一个scale,但是为了达到 预测不同scale 的bounding box的目的,Faster R-CNN 提出了 anchor 的机制,解决了这一问题。典型的模型有:Faster R-CNN,R-FCN等。
- (d):先说下d吧,这是SSD中提出的结构,充分利用了CNN自身的 feature pyramid 结构。结合了不同的层,分别预测,预测的时候是独立的,最后生成结果时才通过NMS融合。严格来说不能算是特征融合,只能说是multi-scale 预测。
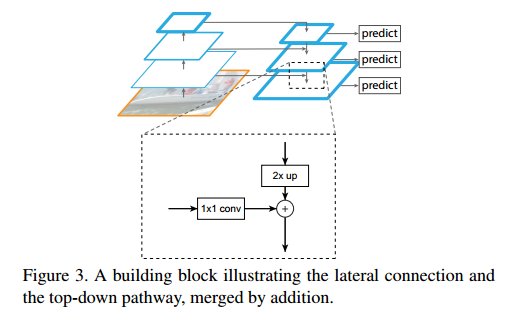
- (c):这是FPN和DSSD提出的结构,这个才是真正的特征融合,在预测之前先通过一系列上采样额外再生成一系列feature pyramid,并通过lateral/skip connections 与CNN主结构上的feature pyramid 特征进行融合,之后再去预测。
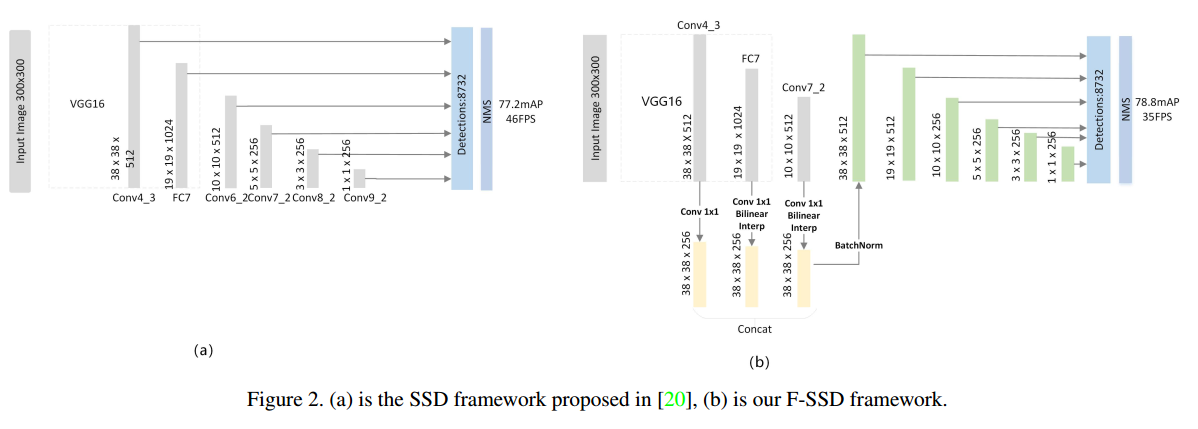
- (e):这是本文的拓扑结构。与FPN结构相似,但实际上跟FPN 有很大的不同。FPN是先上采样,再多个层融合;FSSD是先融合多个层的feature map,后面再跟一个CNN模块,这个CNN模块跟SSD是一样的,采用multi-scale预测。
实际上除了上面的一些拓扑结构之外,还有一种拓扑结构,就是下图的 (b)。
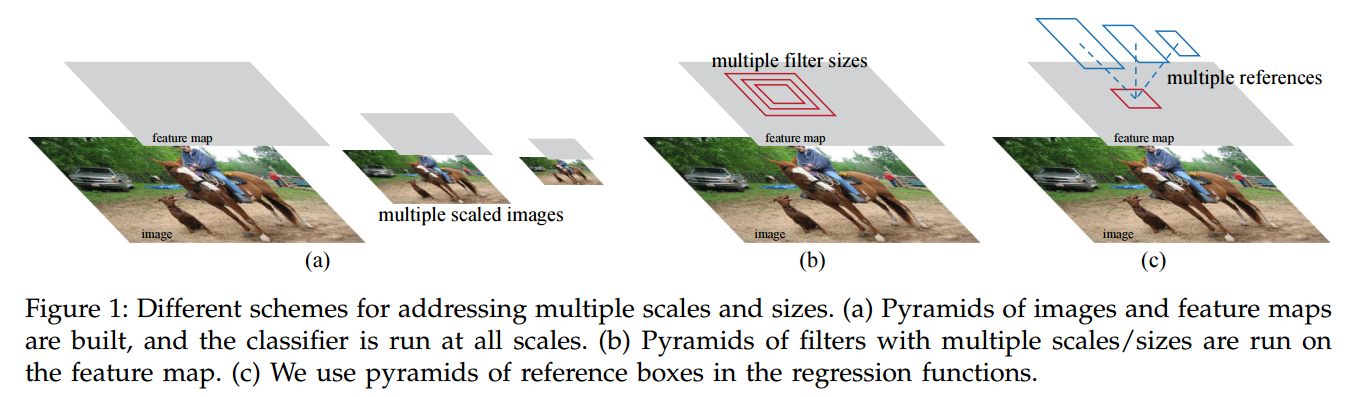
- (a):与前面那个图的(a)是一样的,image pyramid。
- (b):这种结构是前面没有提到的,multi-scale filter ,这个跟SSD比较像,SSD是multi-scale prediction,每一个prediction 都对应一种size的filter。
- (c):Faster R-CNN的anchor机制,从(b)中发展出来的,把multi-scale filter 换成了 multi-scale anchor。
2 模型设计
2.1 Feature Fusion Module
作者认为 FPN的融合是在多个feature map进行的,这种侧向连接和 element-wise add 是很费时间的:
所以作者提出了一种 lightweight and efficient feature fusion module
- 特征融合只在一个位置发生
- 后续的结构跟SSD是一样的
作者提出一种数学模型来表示这种结构:
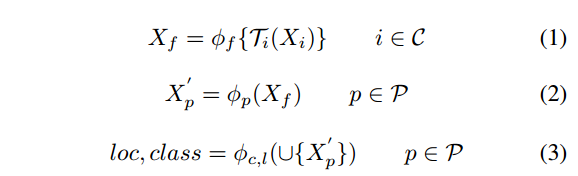
- $X_i, i ∈ C$ :用于融合的 source feature map,SSD中选择的是:conv4 3, fc 7 of the VGG16 and new added layer conv6_2, conv7_2, conv8_2, conv9_2 。这篇文章选用的是conv3 3, conv4 3, fc 7 and conv7_2
- $T_i$ :在融合之前 每一个 source feature map的变换函数,类似于激活函数。在FPN中使用的是 1×1 的卷积来降低输入通道。这篇文章使用的 1×1 卷积 + 线性插值的, 1×1 卷积 同样是为了降低输入通道,线性插值是因为这里的融合是不同level的层或者前后层之间的融合,他们的feature map大小是不一样的,因此需要线性插值将所有的source feature map 转换成统一的大小。FPN中是侧向连接,是同一level的层之间的融合,因此不存在这个问题。
- $\phi_f$ :特征融合函数,FPN中使用的 element-wise summation ,而这个操作不仅要求feature map的大小一样,还要求 feature map的通道数也要统一,这个在FPN中在使用 1×1 卷积时就保证了融合时的通道统一。由于操作麻烦,在FSSD中,1×1 卷积只负责降低通道,而不保证所有feature map的通道统一,融合时选用了concatenation 的操作,简单有效,不需要feature map的通道统一。
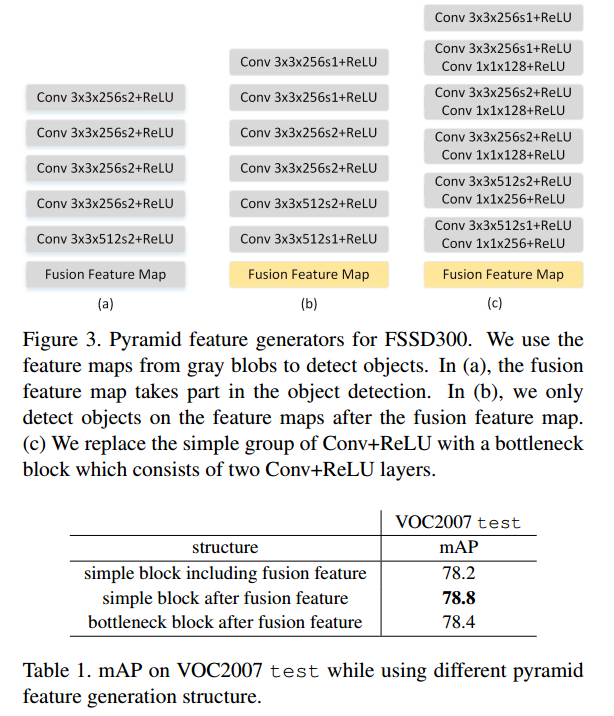
- $\phi_p$ :生成 后续 pyramid features的函数,与SSD一样,只不过这个后续结构,作者在这个部分尝试了多种结构的堆叠,见下图。最终通过实验选择了一种简单的方式,这与SSD中的结构是一样的。
- $\phi_{c,l}$ :用于检测和分类的函数,与SSD一样。
2.2 Training
两种训练策略:
- 第一种:由于这是在SSD的基础上改进的,所以可以使用预训练的SSD,然后fintuning
- 第二种:使用预训练的VGG,然后fintuning
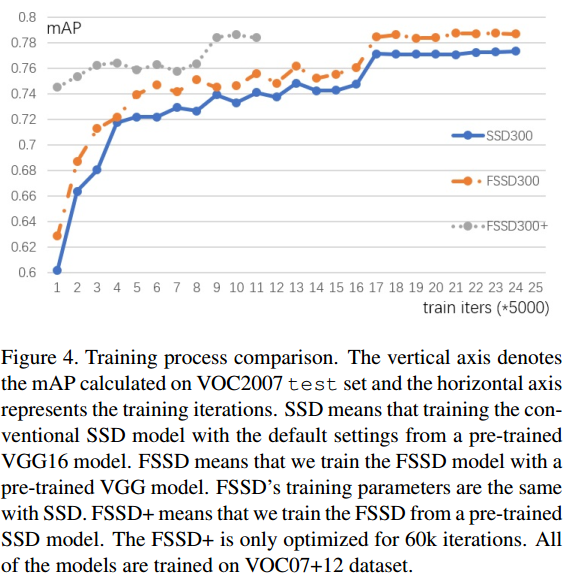
- SSD300:SSD的训练曲线(VGG+fintuning)
- FSSD300:前面提到的第二种,VGG+fintuning
- FSSD300+:前面提到的第三种,SSD+fintuning
两种训练方法训练出的模型的精度相差无几,但是第一种训练方法明显收敛更快。
3 实验
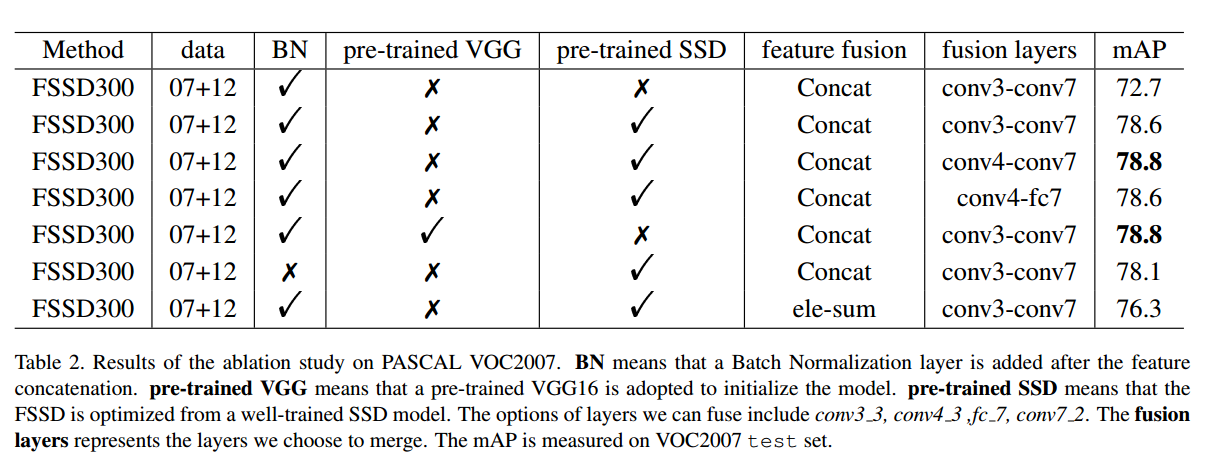
一些对照试验,决定了前面提到的很多参数的选取,比如用于融合的source feature map,融合的方法,训练方法,batch normalization等。
PASCAL VOC
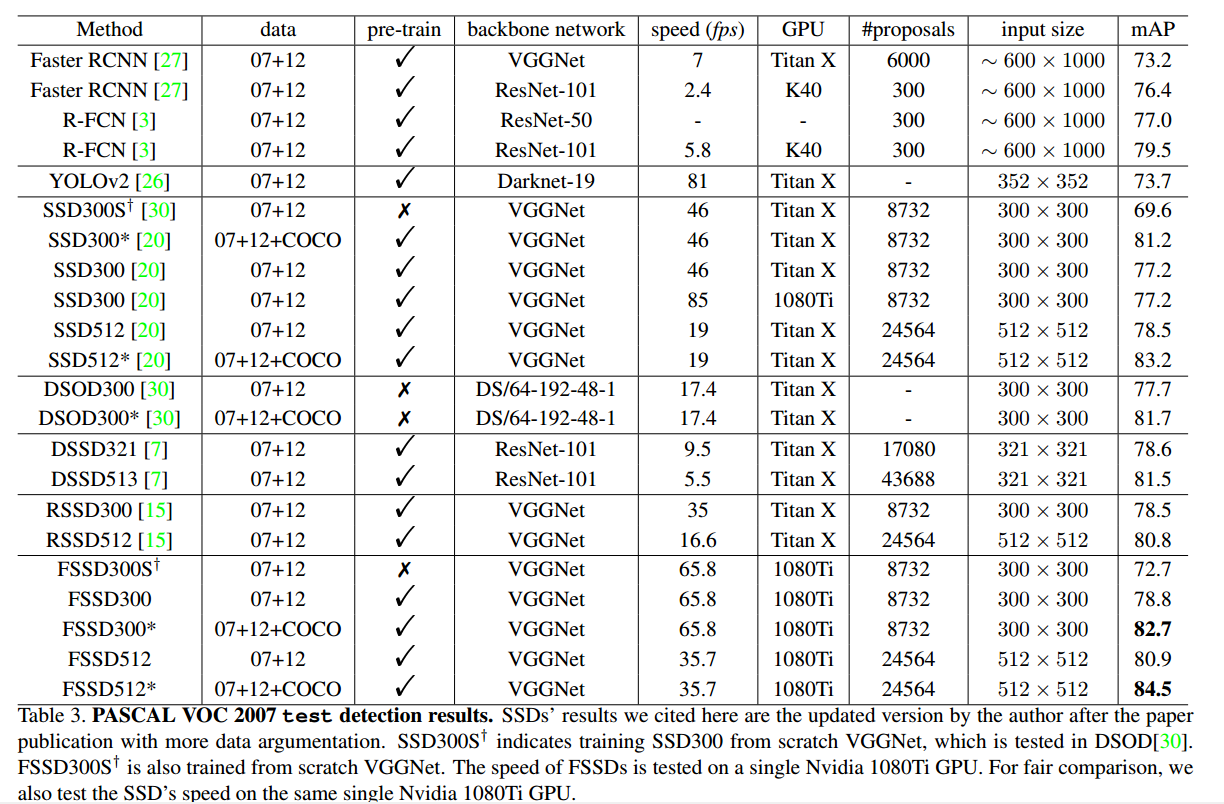
- 注意 在对比速度时,测试的GPU是不一样的,1080ti的性能比TITAN X要好很多。
- 网络的 backbone network也是不一样的。
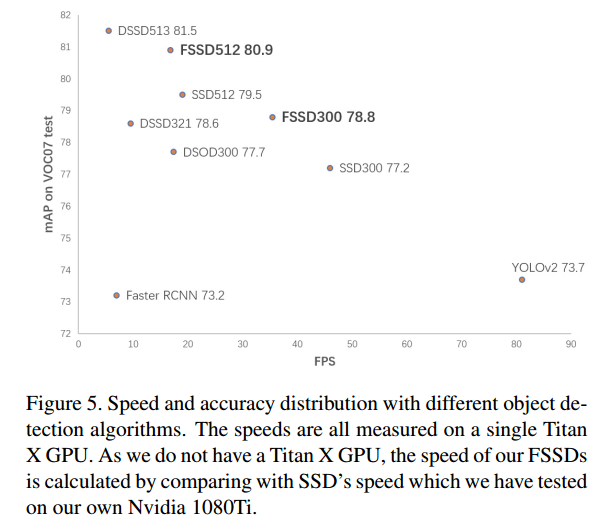
- 同样 注意 在对比速度时,测试的GPU是不一样的
- 这张图对比 FSSD,与SSD的速度是有意义的,因为其他模型都是在TITAN X上测试的。
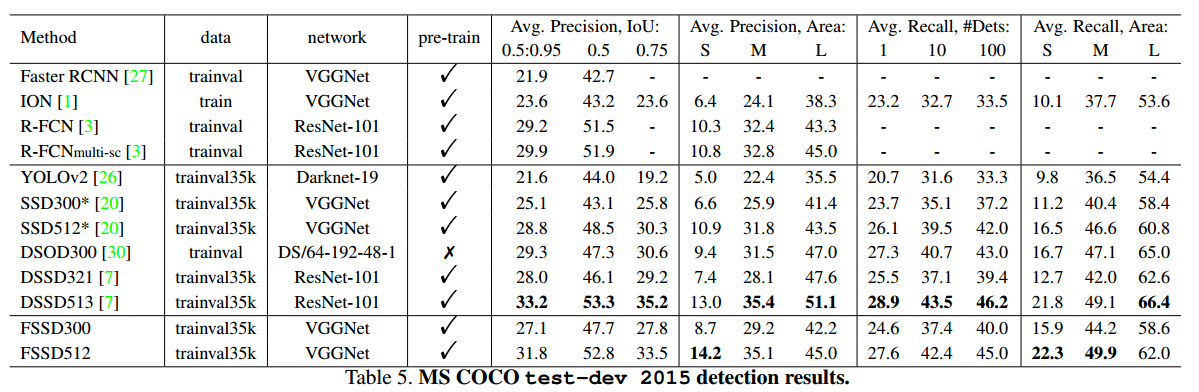
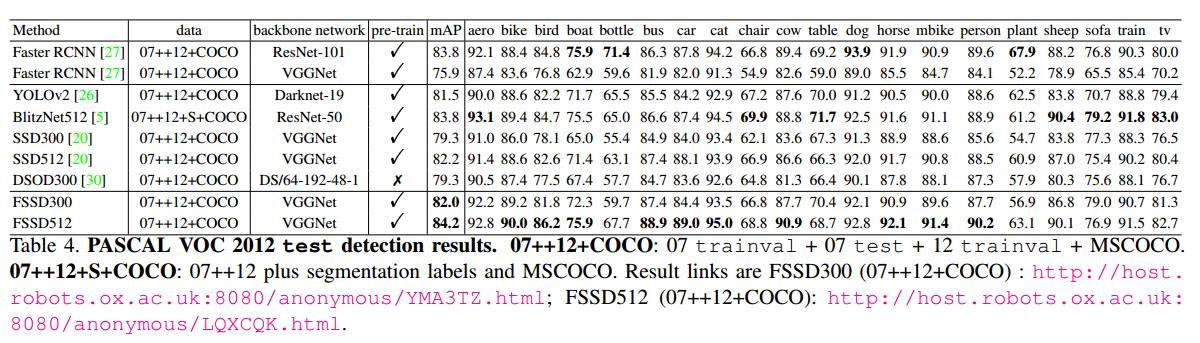
COCO