论文:SqueezeDet: Unified, Small, Low Power Fully Convolutional Neural …
代码:https://github.com/BichenWuUCB/squeezeDet
1 简要介绍
这篇文章提出的SqueezeDet 网络主要是适用于自动驾驶领域的。
SqueezeDet : 基于SqueezeNet 的Detection模型,故称SqueezeDet 。
对于自动驾驶领域来说,几个关键因素如下:
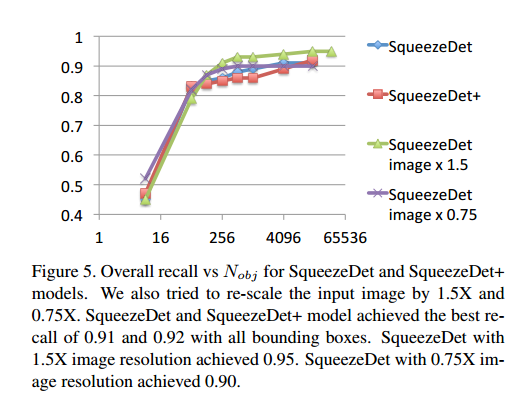
- 精度。高精度,和尽可能高的 recall,最好使100%的recall;
- 速度。应该具备实时检测的速度(30FPS);
- 较小的模型。小的模型好处有:训练时更加高效,车载客户端进行模型更新时需要较少的无线网络带宽和通信消耗,消耗更少的能量,更适用于嵌入式设备部署。
- 能量效率。一些桌面和框架级别的神经网络往往都需要很大的能量耗散(250W),但是对于自动驾驶领域来说,嵌入式处理器才是应该考虑的主要对象。毫无疑问,如何让神经网络模型适应小的能量消耗是个关键问题。
目前很多公司都在研发适用于自动驾驶的处理器,英伟达 的 Xavier 号称实现每秒 30 万亿次计算(TOPS),整个系统功耗(包含CPU,GPU在内)为 30W;英特尔的 EyeQ5 ,号称实现15万亿次计算功耗为 5-6W。
SqueezeDet 主要就是针对以上几个方面提出了自己的架构。
SqueezeDet 主要参考了 SqueezeNet,YOLO和SSD,还有FCN全卷积网络。
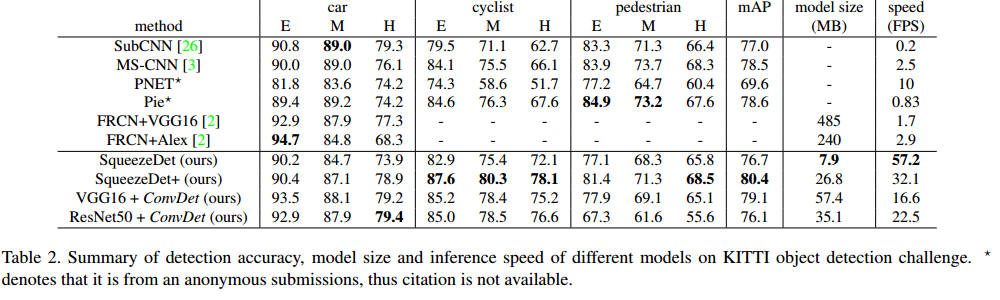
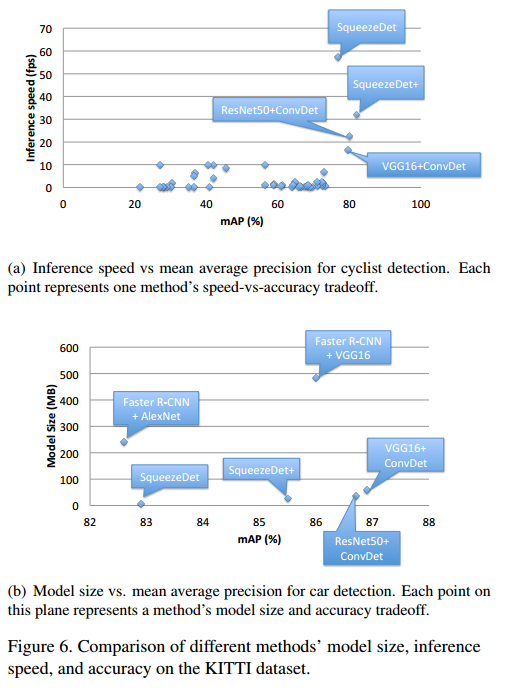
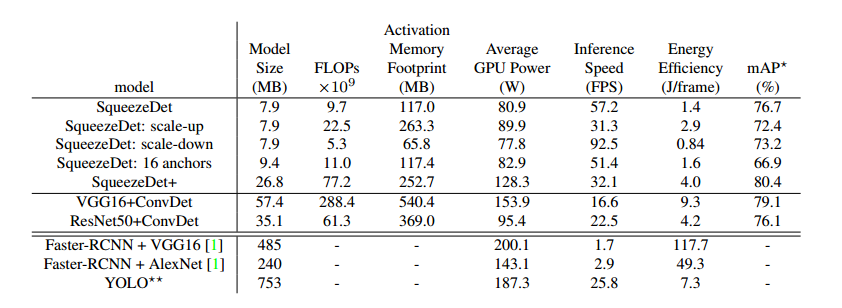
最终的效果是,在KITTI 数据集上,输入分辨率为1242×375的情况下,其速度达到了57.2FPS,模型体积仅为不到8MB;在TITAN XGPU上 检测一张图片的能耗为 $1.4J$,这是Faster R-CNN 的1/84. 而精度也达到了目前 state-of-the-art水平。在某些方面甚至超过了其他的模型。
2 结构设计
先回顾一下跟这篇文章有关的,其他的网络结构。
2.1 YOLO
与Faster R-CNN相比,YOLO是属于一步到位的模型,不需要预先生成候选框,然后再去提取特征进行分类和回归。
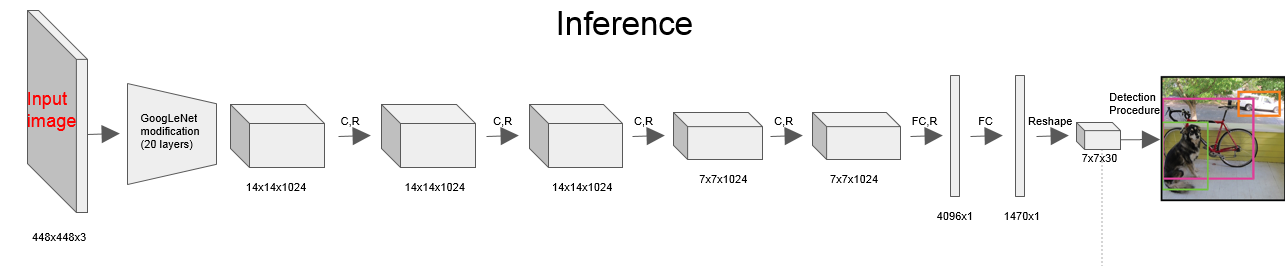
YOLO的模型结构,如下:
但实际上YOLO也是有生成候选框的步骤的,只是 这个步骤跟检测合并到一起了。那这个生成候选区域的步骤在哪呢。
先看下面这两张图
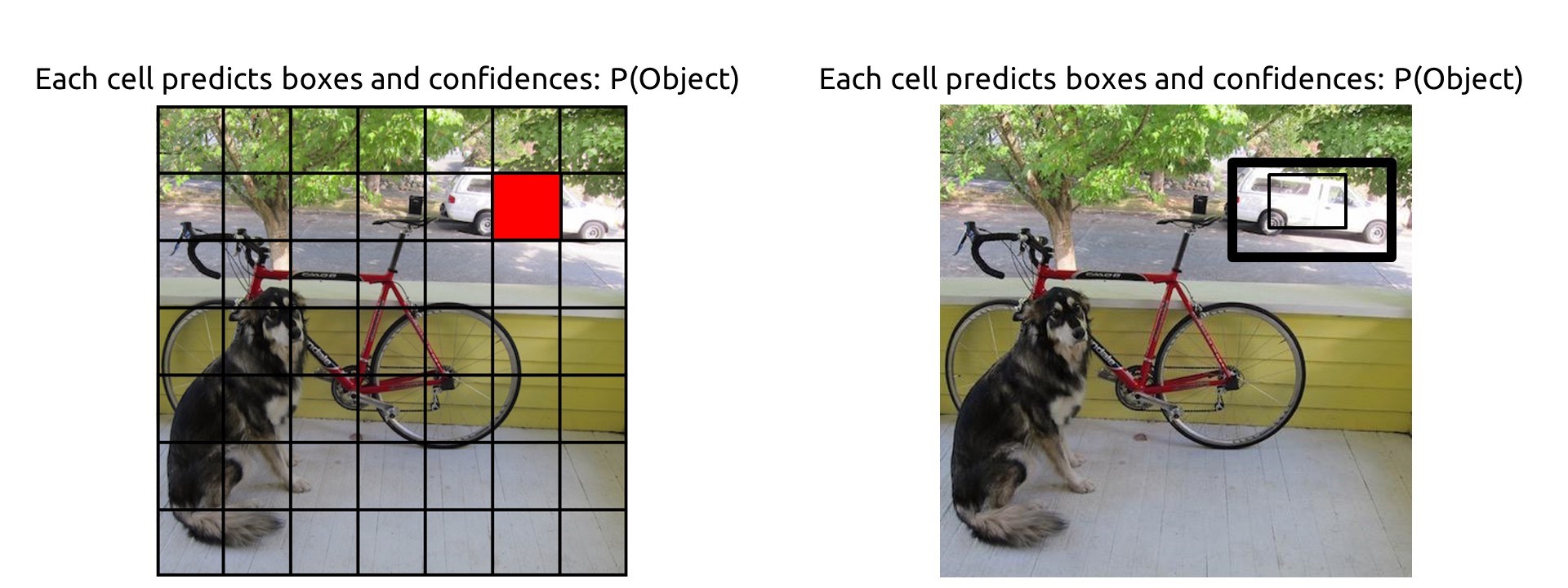
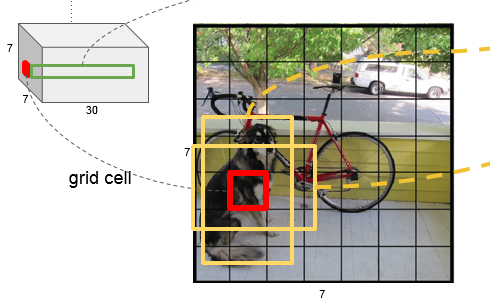
YOLO的方法是这样的,将原图分成一个 7×7的网格:
对于每一个网格都预测两个 形状不同的bounding box(box的尺寸可以大于网格的大小),那么图片上目标的bounding box 肯定跟某几个不同的网格中的bounding box 距离最近。
那也就是说每一个网格所关联的两个 box (类似Faster R-CNN中的anchor)里面的区域有可能是目标,也有可能不是目标,或者只包含目标的一部分,或者一部分是目标,一部分不是目标。
那么这样一来每个 bounding box 都有一个概率,表示他是目标的概率。这个概率 是
$$
P_r(Object)*IOU_{truth}^{pred}
$$
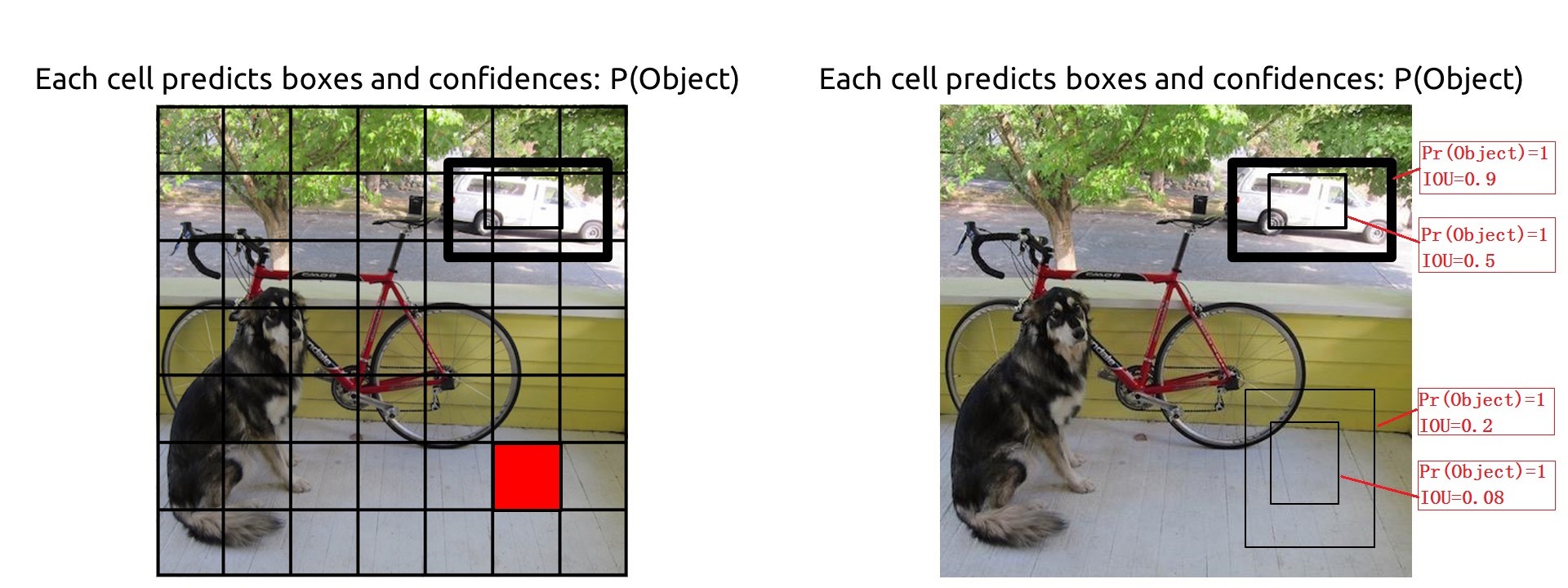
其中 $P_r(Object)$ 表示这个box中是否存在目标,存在就为1,不存在就为0. 比如上面两张图中,不同的两个格点(红色)对应着不同的两组 boxs,每个格点对应两个box,由于这四个box都与目标的区域有重叠(IOU不为0),所以这个四个box的 $P_r(Object)$ 都为1. 其实这个 $P_r(Object)$ 就是用 IOU (与ground truth之间的IOU)衡量的,首先计算IOU,只要IOU 不为0, $P_r(Object)$ 就是1. 一个box中有目标的概率其实就是IOU的值。
除此之外,每个box还都有位置信息,用坐标来表示,中心点坐标(x, y),以及box宽和高,w,h。
到此为止,每个格点关联的每个box有5个属性,4个位置信息,1个confidence信息。那一个格点关于box 的定位信息有10个。
但是检测不仅要检测出目标,还要识别出目标是什么物体,因此还需要额外的信息。假设要识别的类别总数为C,YOLO中,对于每个格点(不是关联的两个bounding box)都做一个物体类别预测。
那么一个格点还会产生C个物体类别预测信息。对于PASCAL 数据集来说 C=20。那此处
那也就是说一个格点经过网络之后,要得到 共30个信息,这里面包含定位(10)和识别信息(20维)。
所以我们观察一下YOLO的最后全连接层那一部分,可以看到YOLO用了两个全连接层,一层是4096×1的,还有一个是 1470×1的。前面的4096可以认为是根据经验选取的(alexnet,VGG第一个全连接层都是4096维的),但是后面的1470×1就不是经验值了,其实是 1470=7×7×30。
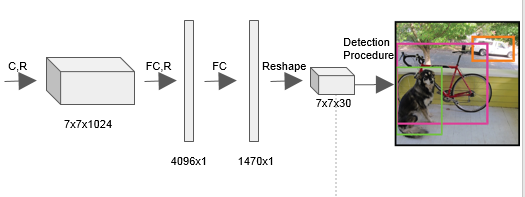
那这个是什么意思已经很明白了。此处的 7×7 就是要把图片分成多少 格点,后面的30就是每个格点要预测的信息维数。结合下图更明了。
那其实到这里就可以看出来了,YOLO解决的方式其实属于是回归问题。前面24个卷积层提取特征,后面两个全连接层,用于回归。回归的是什么?回归拟合的是每个格点两个box的坐标值(5×2),和每个格点的分类向量(20)。
2.2 Faster R-CNN
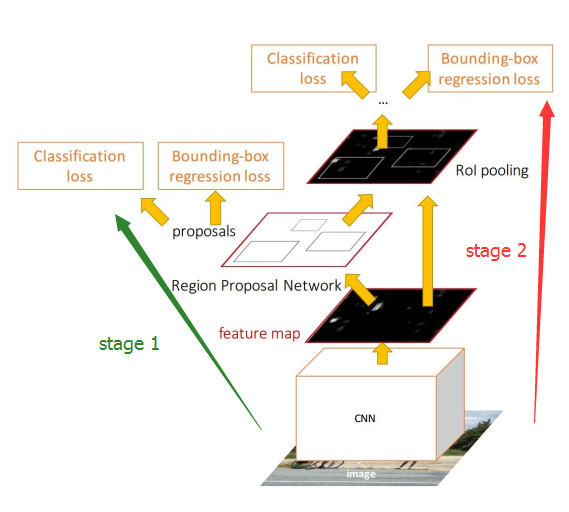
Faster R-CNN的结构见下图,很显然是两步检测的,先生成一系列可能是目标的区域(stage 1),然后对这些区域进行检测(stage 2)。stage 2的箭头起点不太对,应该是从 proposals开始,前面的卷积部分是共享的。
实际上,Faster R-CNN的stage 1就已经产生目标检测的区域了,可以认为这已经是一个 弱的检测器了(这个称为RPN),这个stage 1已将包含了定位的信息,只是它只确认区域中是否包含目标,而不关心包含的是什么类别的目标。stage 2是一个强检测器,除了进一步精修定位信息,最主要的是把目标类别识别来。
假设我们在stage 1中把候选区域中的目标类别也预测出来,那其实stage 2可以不用了。
YOLO 其实就相当于 Faster R-CNN的stage 1步骤,当然细节上会有不同。比如
- YOLO后面使用的是全连接层,而Faster R-CNN stage 1步骤(RPN)后面使用的是全卷积层。
- YOLO每个格点的是预测目标类别的(多分类),RPN只预测是否是目标(二分类)。
再看看RPN的主要结构,如下图:
主要就是 anchor这个机制,假设feature map上每个像素关联k个anchor。
假设前面用的ZFNet,那么最后一个卷积层输出的feature map是13×13×256的。
先看其中一个window,如果后面使用256个3×3×256的卷积核,那么 256-d那个地方输出的就是 1×1×256维的,那么后面的cls层(二分类)就是2k个1×1×256的卷积,输出为1×1×2k;reg层(定位)就是4k个1×1×256的卷积,输出为1×1×4k。
与YOLO不同的是,每一个anchor(对应YOLO中每个格点内的两个box)都输出类别概率。
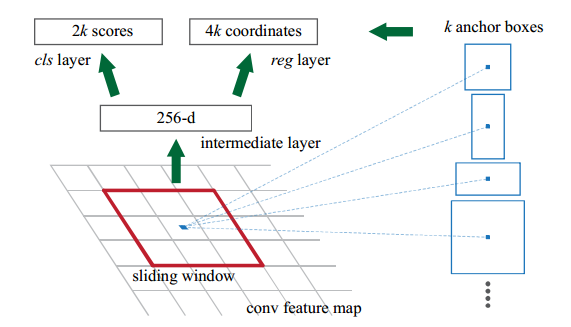
图上那个sliding window的做法,在实际操作的时候,其实就是用了卷积的方式,步长为1,pad为1.
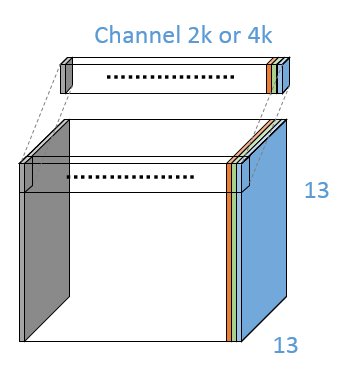
所以实际上 256-d那个地方其实是 13×13×256。对应的cls层和reg层的输出分别是13×13×2k,13×13×4k,如下图。13×13维度上每一个 1×1×2k或4k的长条,都代表图片上不同位置的anchor box的类别信息或者位置信息。
2.3 SSD
先看下SSD的宏观结构,如下图,FC6和FC7以及之前的部分是VGG的内容,后面是SSD里面加的。SSD添加的层
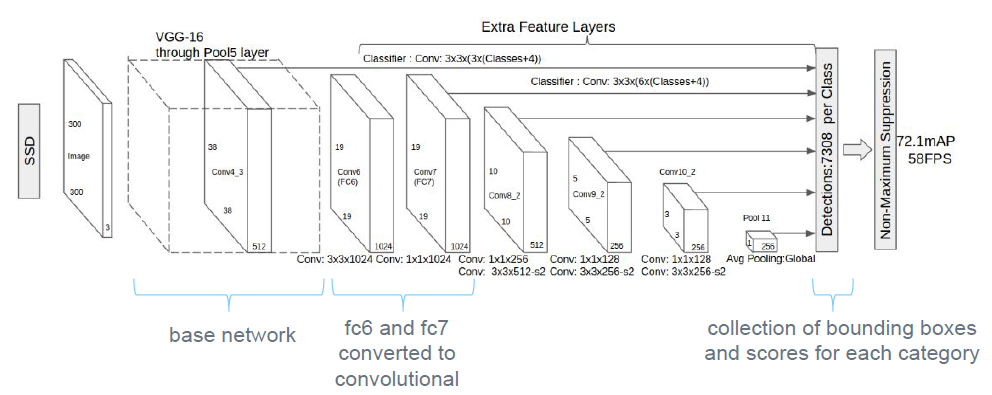
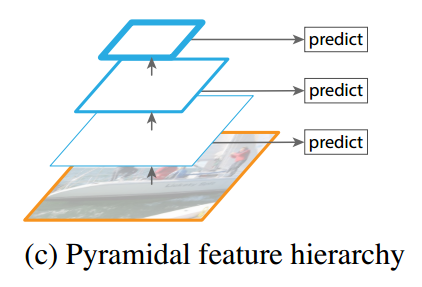
这是一个多尺度预测(Multi-scale)的网络,如下图从FPN的论文里找来的图。就是从不同的feature map上预测,然后将各个预测结果融合到一起。
然后将SSD与YOLO相比较一下,如下图。可以看出YOLO是单一尺度的。二者最大的区别也在此。当然在框的生成方面SSD也是一步到位的,一边生成框,一边检测。
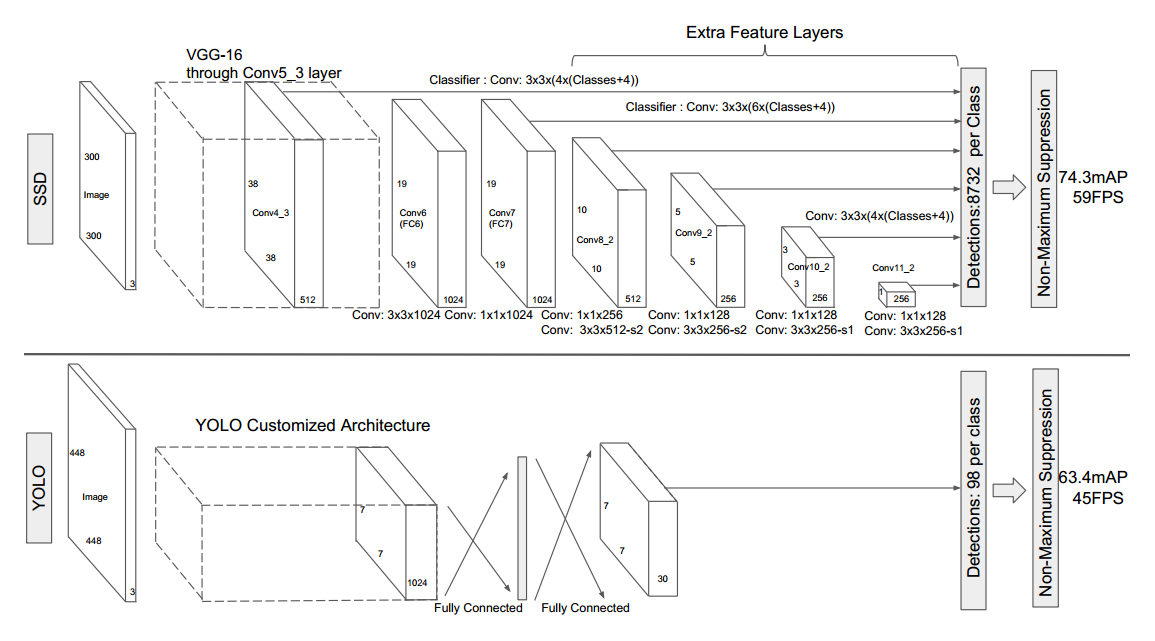
更详细的看一下SSD的检测流程如下:
总共6个尺度,每一个尺度上都进行框的生成和预测。最后使用NMS(非最大值抑制)进行过滤,得到最后的结果。
与YOLO的不同主要在于:
- 多尺度
- 主干部分,全卷积
- 预测部分也是卷积(YOLO的预测部分是全连接层)
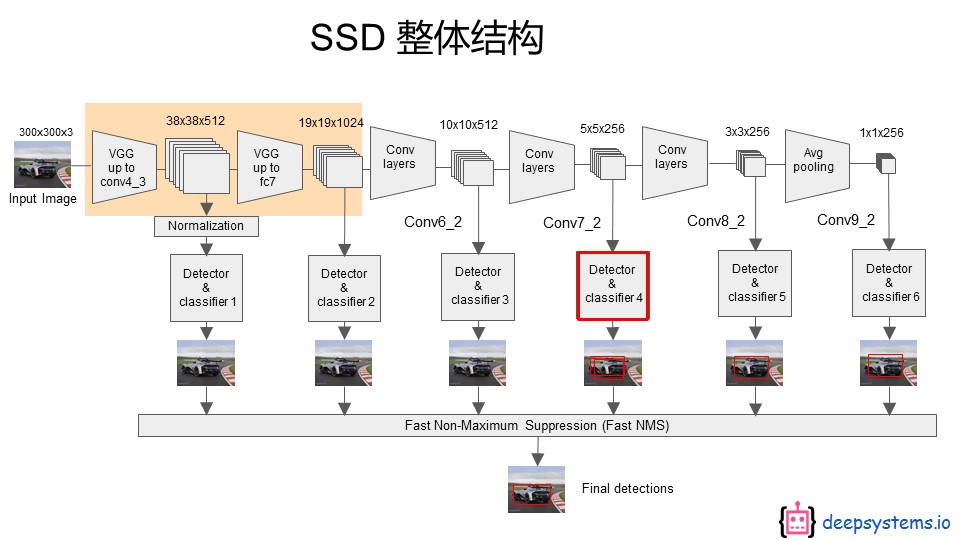
接下来看看SSD是如何检测的。如上图红色框,这一部分其实是使用 3×3的卷积实现的。具体细节看下图:
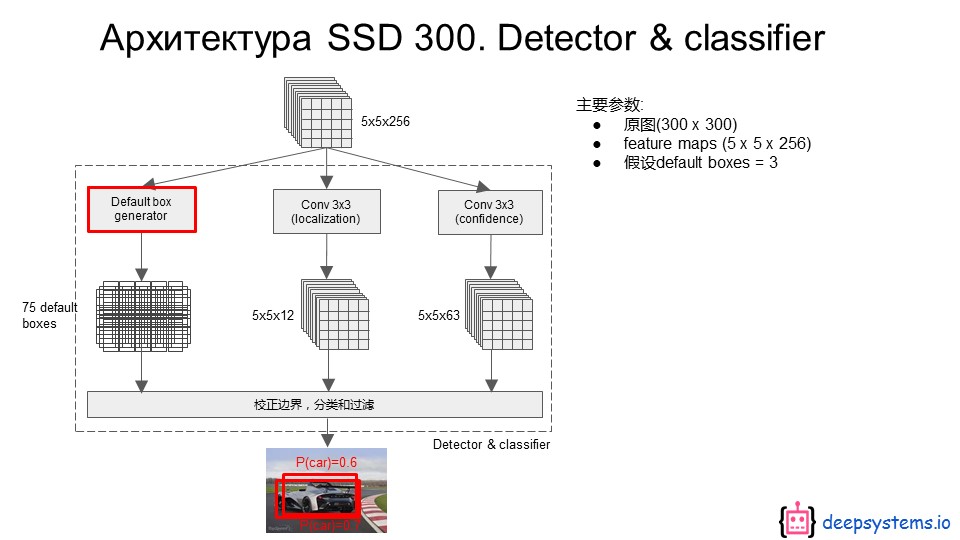
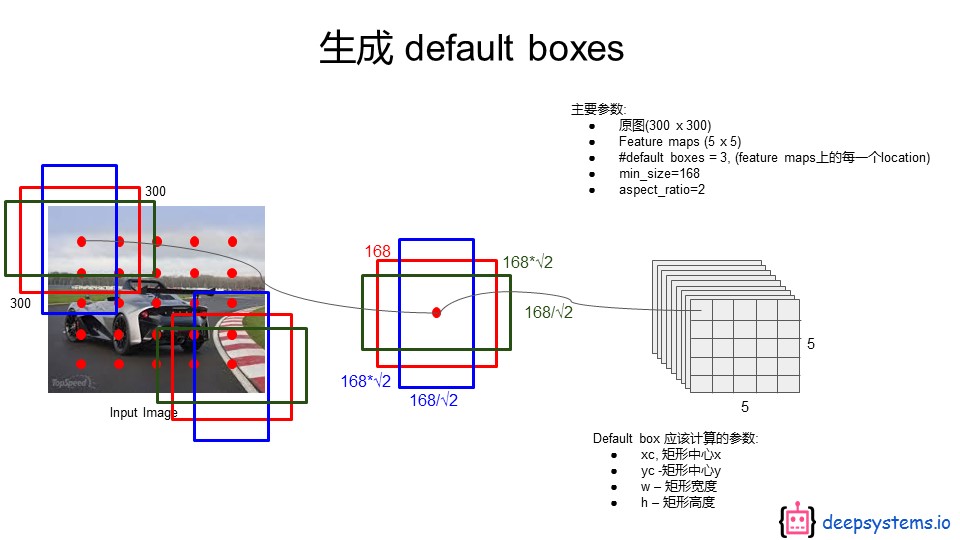
再看看是怎么生成default box的,如下图。最右边那个就是对应的feature map的尺寸,然后将feature map上的每一个像素点都映射到原图上(最左边),然后映射到原图上的每一个像素都关联三个不同的default box。
有没有发现这跟 YOLO中的 网格划分很像,只不过YOLO是划分成网格,这个网格划分对应于最后一个全连接层做了reshape 的feature map,每一个网格也只包含一个像素,每一个像素再映射到原图上。
但其实更像的是Faster R-CNN中的 anchor box。
- 与YOLO不同的是,每个 default box(对应YOLO中每个格点内的两个box),都输出4个位置信息和 (C+1) 个类别信息(包含1个背景)。
- 与Faster R-CNN 不同的是,每个 default box(对应Faster R-CNN 中的两个anchor box),都输出(C+1) 个类别信息,而不是一个二分类标记box是不是目标。
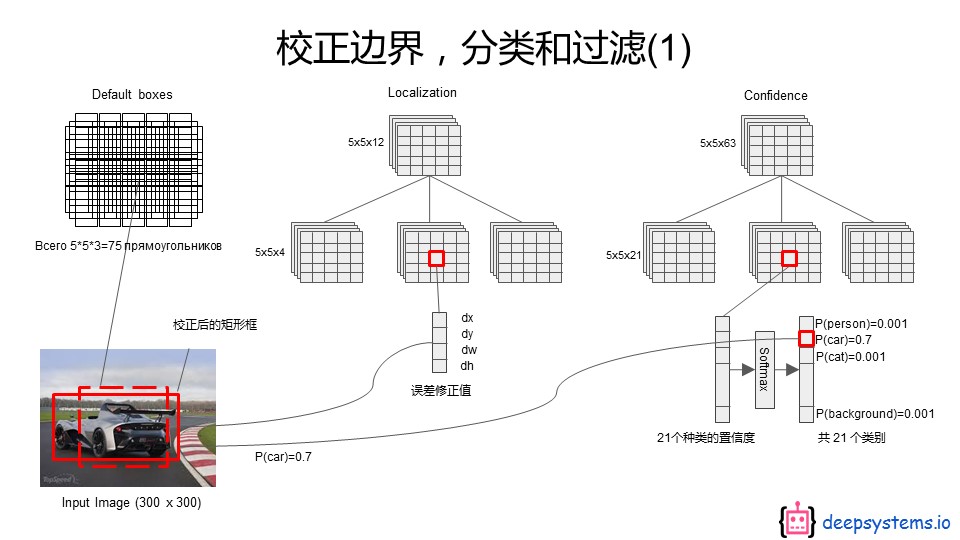
看下图这个就是分类和检测的实现方法,跟Faster R-CNN中的RPN如出一辙。
2.4 SqueezeDet
2.4.1 结构分析
网络结构如下:
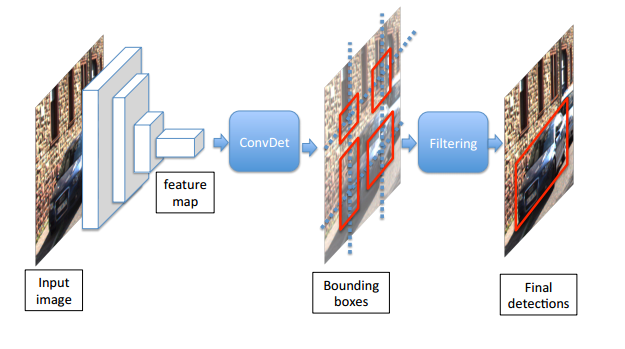
前面是特征提取网络,这里用的SqueezeNet,中间是本文提出的ConvDet层,后面是Filtering层。Filtering层就是NMS(非最大值抑制)。
ConvDet层意即,使用卷积层来检测(Detection),因为经典的用法是使用全连接层来进行检测(比如YOLO),不过Faster R-CNN中的RPN相当于一个全卷积的弱检测器。这个方面来说SqueezeDet,跟RPN也挺像。
但是SqueezeDet更像SSD. 就相当于SSD的一个尺度分支,只不过前面卷积层提换成了squeezenet。
再看一下 SqueezeDet 关于anchor box的图,是不是跟SSD和RPN很像,简直如出一辙。
2.4.2 计算量分析
以下图中 蓝色的为某一层的输出特征,而黄色的是神经元的参数分布(权值和偏置)
以下3D卷积写法均略去前一层的输入通道数
- 首先看下RPN的参数量:
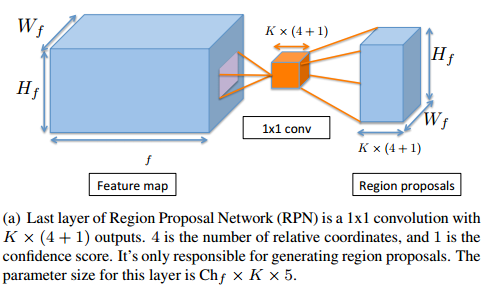
输入是 $W_f× H_f×Ch_f$ 的feature map,
中间黄色的部分是 $1×1$ 的卷积核,如果把分类和回归放在一起,那么卷积核的个数就是 $K×(4+1)$ 个,4是四个坐标,1是一个概率,K是K个anchor。
把分类和回归的输出也放在一起,那么输出feature map就是$W_f× H_f×(K×(4+1))$ 大小的。
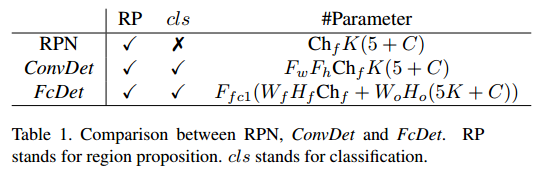
参数量为 : $1×1×Ch_f ×K×5$
- 再看下 YOLO中的参数量:
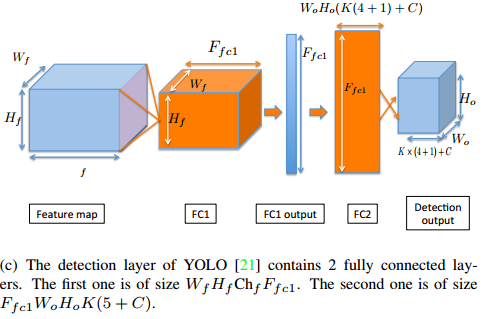
这个检测模块称之为 FcDet
同样输入是 $W_f× H_f×Ch_f$ 的feature map,
假设将图片分成 $W_o ×H_o$ 个网格(比如7×7);每个网格关联K个box(比如K=2);每个box输出(4+1)个信息(4个位置信息,1个类别信息);每个格点输出C个类别概率(比如20)。
首先看第一个卷积层,FC1标号的是神经元的参数分布,可以看到从卷积层到全连接层的参数分布其实是一个 $W_f× H_f$ 的卷积核,这个卷积核与一整张feature map卷积,只输出一个激活值;这样的卷积核共有 $F_{fc1}$ 个,因此FC1输出为 $1×F_{fc1}$ 。
这一层参数量为:$W_f× H_f×Ch_f×F_{fc1}$
接着第二个全连接层,FC2标号的也是神经元的参数分布,这里用的是 $1×1$ 的卷积层实现的,由于上述假设,FC2的输出应该是 $1×\{W_o ×H_o×(K(4+1)+C)\}$ ,是一个二维的tensor;但是为了与划分的网格匹配,需要将这个输出reshape成$W_o ×H_o×(K(4+1)+C)$ 这样的三维tensor。
这一层参数量为: $F_{fc1}×W_o ×H_o×(5K+C)$ 。
FcDet整个结构的参数量为:$W_f× H_f×Ch_f×F_{fc1} + F_{fc1}×W_o ×H_o×(5K+C)$
- 看下这篇文章提出的ConvDet结构的计算量:
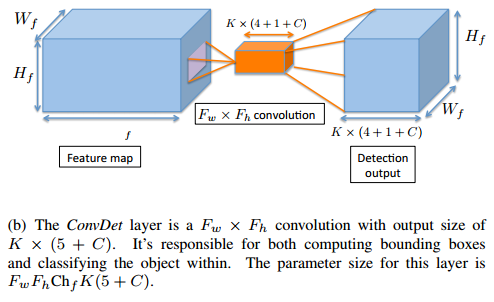
这个结构说白了就是SSD的一部分,再来对比一下,看看下图SSD中相对应的部分,这个图中把分类和回归定位分开画了,不过SSD的代码中实际上也是分开做的,其实这部分可以合并到一块的,因为卷积都是用的3×3,输出也都是 5×5,所以合并到一块也是可以的,只是不同的通道对应着不同的分类或者定位结果。
基本上二者相同,只不过这里起了个名字,叫做ConvDet。
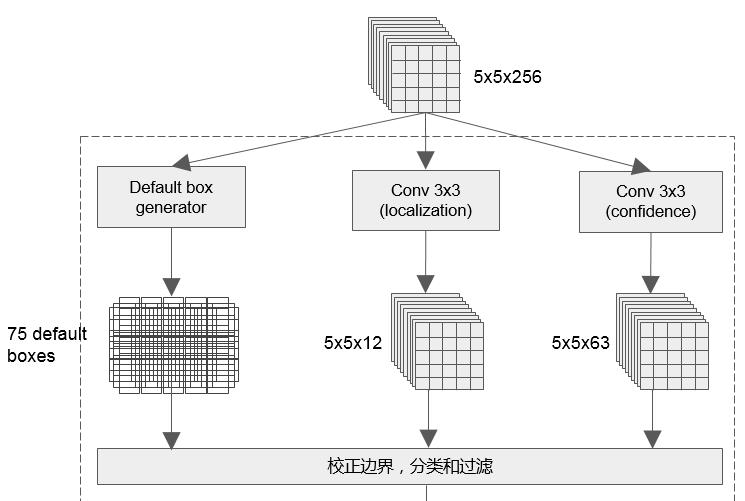
同样输入是 $W_f× H_f×Ch_f$ 的feature map,
只不过这里假设 卷积是 $F_w×F_h$ 的(SSD对应结构中用的是3×3),通道数为 $K×(4+1+C)$ , K为 anchor(或 default box 或 格点内关联的box)的个数,4为每个anchor的位置信息,1为是目标的概率,C为C个分类。这样输出为 $W_f× H_f×\{K×(4+1+C)\}$ 。
ConvDet的参数量为: $F_w×F_h×Ch_f×\{K×(5+C)\}$
与YOLO 相比,没有使用全连接层,而是使用了全卷积的(FCN)方式。其实就是SSD中的一部分。
- 三者参数量对比:
举个例子计算下:
假设输入feature map 为 $7×7×1024, F_{fc1} = 4096, K = 2, C = 20, W_o = H_o = 7,$ ConvDet 使用3x3 的卷积核
YOLO: $4096×(7×7×1024+7×7×(5×2+20))=212×10^6$
ConvNet: $3×3×1024×2×(5+20) =0.46 ×10^6$
2.6 训练
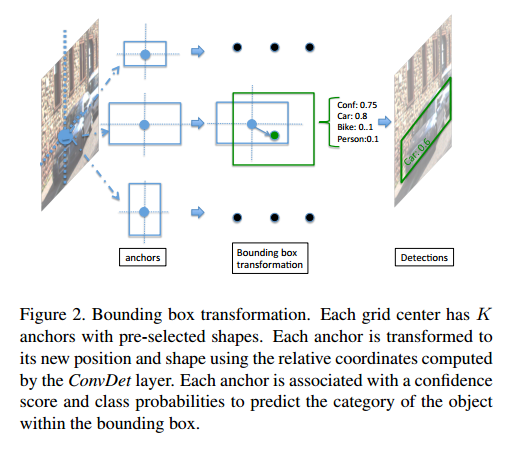
先看一下,网络预测的是什么
如下图:
- 绿色框为ground truth
- 红色为anchor
- 蓝色为预测的box
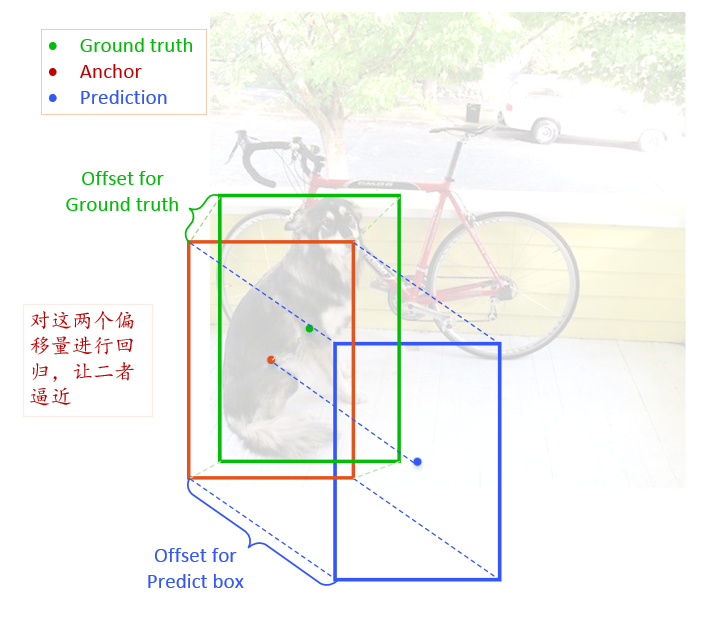
首先,Ground Truth 与 Anchor 有个偏移值,如下:
$$
Offset^{GT}=\{\delta ^G(x_{ijk}),\delta ^G(y_{ijk}),\delta ^G(w_{ijk}),\delta ^G(h_{ijk})\}
$$
其次,Prediction 与 Anchor 有个偏移值, $Offset^{P}$,如下:
$$
Offset^{P}=\{\delta (x_{ijk}),\delta (y_{ijk}),\delta (w_{ijk}),\delta (h_{ijk})\}
$$
对于定位来说:可以认为,这个网络预测输出的是 $Offset^{P}$ ,标签是 $Offset{^GT}$ ,转化一下,实际上网络输出的是 $ \delta (x_{ijk}), \delta (y_{ijk}), \delta (w_{ijk}), \delta (h_{ijk})$ ,因为这四个参数决定了 $Offset^{P}$ 。
分类就是输出类别,标签为真实类别。
以上偏移是由网络学习得到的。
偏移与最终的输出之间还有一个映射关系,这个关系是人为指定的。这个关系最先在R-CNN系列的目标检测模型中提出。下述。
最终的预测框的中心坐标 $(x_i^p,y_i^p)$ 和宽高 $(w_k^p,h_k^p)$ 的计算方式如下:
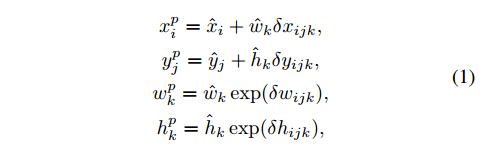
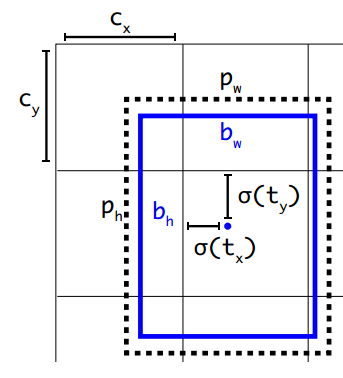
$\hat x_i,\hat y_i$ 是与box关联的feature map中的像素(或者说类似于YOLO中的格点)的坐标,如下图中的 $C_x,C_y$ 。
$\hat w_k,\hat h_k$ 是 每个像素(或格点)关联的第k个anchor的 宽和高,如下图中的 $b_w,b_h$
偏移与真实位置之间的映射有两种,线性映射(中心点坐标)和指数映射(宽,高)。
这个地方可以结合 YOLO9000论文中的一张图理解。不过对于预测和anchor的关系,二者刚好反过来。
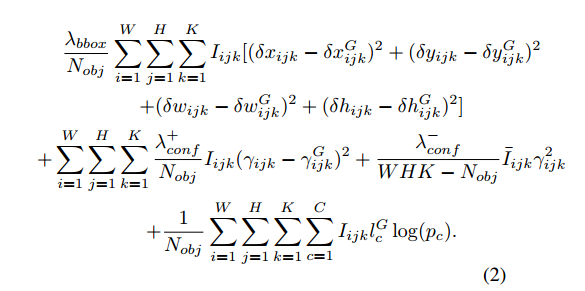
- 再来看一下损失函数,如下:
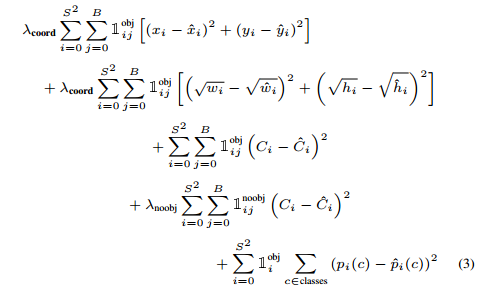
损失函数与YOLO的损失函数差不多,放一张YOLO的对比一下:
解释一下SqueezeDet的损失函数:
主要分为三部分:
第一部分是回归损失,或者说定位损失,就是下图这个:
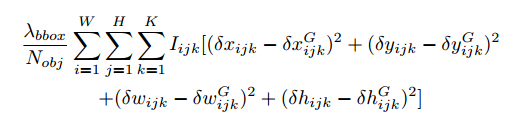
- $I_{ijk}$ 表示:位于 输出feature map上 $(i,j)$ 坐标处的第 $k$ 个anchor 是否包含有目标。也就是 这个$P_r(Object)*IOU_{truth}^{pred}$ 是否为0.
- $\delta x_{ijk},\delta^G x_{ijk}$ 分别表示anchor与预测box和ground truth 的 x 坐标的偏移。后面其他的参数,y,w,h类似。
- 这是一个均方误差。没有采用YOLO那样的将 宽度w和高度h开根号,再做均方误差。YOLO这么做是考虑了对于大小目标计算损失时的公平问题。
第二部分是二分类损失,这个二分类决定的是这个anchor是否是目标,如下:

- $\gamma _{ijk}$ :$P_r(Object)*IOU_{truth}^{pred}$
2.5 试验结果